


EtherCATの概要
EtherCATとは、Ethernet通信技術をベースに開発された、FA(Factory Automation:工場自動化)のための産業用イーサネット(フィールドネットワーク)規格の一つです。ドイツ企業ベッコフオートメーションが2003年に発表しました。EtherCATという名前は、Ethernet for Control Automation Technology の略で、制御自動化技術用のイーサネットという意味があります。
EtherCATを利用すると、製造ラインやFA装置などを構成する要素である、アクチュエータやセンサ、PLCやPC、ロボットといった複数の機器を、LANケーブルで接続することができます。すると、制御システムは省配線となり、ネットワークに接続されたあらゆる機器からのデータや情報を、瞬時に収集し、リアルタイムに制御することが可能になります。

また、EtherCATは、業界トップクラスに高速で、同期性能も高く、技術仕様がオープン(国際標準規格)であるため、多くのメーカーが対応機器を開発・販売しています。EtherCATの管理団体であるETG(EtherCAT Technology Group)への会員登録数は、2023年まで世界で7000社を超えており、ベンダに依存しない機器選択の自由度が高いことも特徴の一つです。

EtherCATとEthernetとの違い
EthernetもEtherCATも、LANケーブルで機器同士を接続し、ネットワークを構築してデータや情報のやりとりをするのは同じです。一方で、EtherCATは産業用途に求められる高速性、同期性、リアルタイム性を実現するために、Ethernetと異なる方法で通信をしています。

一般的なEthernet通信は、TCP/IPプロトコルを利用します。TCP/IPプロトコルは無数の機器と確実に接続するために適しています。しかし、機器同士の接続を確立させるためにフレームの送受信を何往復する必要がある、高速で周期的な通信を正確に行うことができないといった面もあるため、産業用途、特に複数軸の高速同期制御をもとめられる装置には向きません。
一方でEtherCATは、専用の産業用プロトコルを利用することで、高速性、同期性、確実性を保証しています。『マスタ-スレーブ方式』と呼ばれる通信方式で、機器間でデータをやり取りします。フレームを送信するのはマスタのみで、1つのフレームを1回の送信で複数機器とのデータ入出力が可能です。これはスレーブ機器がフレームを 『On the Fly』処理することで可能になることですが、詳しくは後ほど説明します。
EtherCATと各イーサネットフィールドネットワークとの比較
EtherCATの他にも、産業用途に使われているイーサネットフィールドネットワーク技術は他にもいくつかあります。EtherNet/IPやModbus TCP、CC-Link IE、PROFINET、POWERLINK、SercosⅲやMECHATROLINKⅲといった産業用プロトロコルです。。
これら主要な産業用イーサネットについて複数項目で比較したのが、以下の表です。
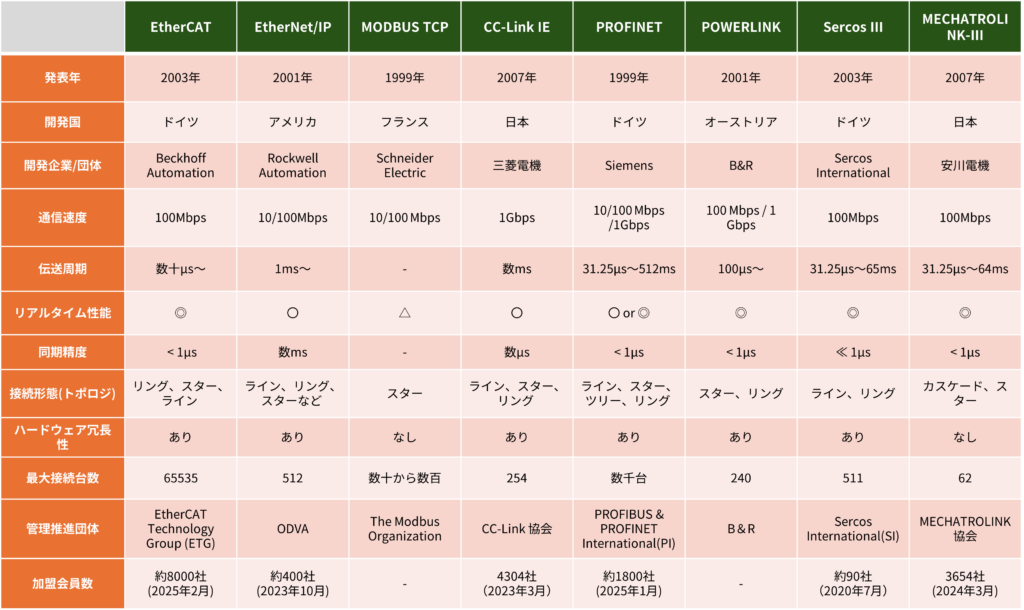
一覧表で比較した、各イーサネットフィールドネットワークの概要は以下のようになります。
- EtherCAT
-
2003年、ドイツのBeckhoff Automationによって発表されました。コントローラ側は完全なソフトウェアで、アクチュエータやIO機器側は専用ASICなどで実装することで、超高速でリアルタイムなモーション制御を可能にする通信技術です。
- EtherNet/IP
-
2001年、アメリカのRockwell Automationによって発表されました。標準のEthernetに、CIP(Common Industrial Protocol)を使用することで、センサやPLCなどの制御系から、PC間データ通信などの情報系まで幅広くカバーできるのが特徴です。
- Modbus TCP
-
1999年、フランスのSchneider Electricによって発表されました。仕様がシンプルで、導入が比較的容易なため、自動化設備に広く利用されています。
- CC-Link IE
-
2007年、日本の三菱電機によって発表されました。CC-Link IEコントローラネットワーク、CC-Link IE フィールドネットワーク、CC-link IEフィールドネットワークBasicといくつか種類があります。PLC間通信やモーション制御など、用途によって選ぶことができます。
- PROFINET
-
2001年、オーストリアのB&Rによって発表されました。標準のEthernetをベースに、専用のハードウェアを必要としないリアルタイム制御を可能にしています。POWERLINKの通信機能が実装された、openPOWERLINKというソフトウェアが無料で公開されています。
- POWERLINK
-
2001年、オーストリアのB&Rによって発表されました。標準のEthernetをベースに、専用のハードウェアを必要としないリアルタイム制御を可能にしています。POWERLINKの通信機能が実装された、openPOWERLINKというソフトウェアが無料で公開されています。
- Sercos Ⅲ
-
2003年、ドイツのSercos Internationalによって発表されました。最小の通信サイクルタイム31.25μsを可能にし、高速で高精度なモーション制御を実現する産業用イーサネットプロトコルです。EtherNet/IPやTCP/IP通信との共存も可能です。
- MECHATROLINK-Ⅲ
-
2007年、日本の安川電機によって発表されました。ドライブ機器やIO機器側に専用ASICを使用し、高速なリアルタイム制御通信を実現します。高速、高精度なモーション制御に特化したリアルタイムイーサネット通信技術です。
参考文献
- EtherCAT:https://www.ethercat.org/jp/technology.html
- EtherNet/IP:https://www.odva.org/
- Modbus TCP:https://www.modbus.org/
- CC-Link IE:https://www.mitsubishielectric.co.jp/fa/products/cnt/plcnet/pmerit/cclink_ie/spec/index.html
- PROFINET:https://www.profinet.com/
- POWERLINK:https://www.br-automation.com/ja/technologies/powerlink/
- Sercos Ⅲ:https://www.sercos.jp/
- MECHATROLINK-Ⅲ:https://www.mechatrolink.org/jp/index.html
