モーションコントローラとはどんな機器で、どのように選べばいいのか、こちらの記事でご紹介しました。
今回は、モーションコントローラとPLCやPCといった上位コントローラを通信する方法の一つ、汎用Ethernet(イーサネット)通信を例にあげ、その特徴および利用するメリットについてご紹介します。
汎用 Ethernet(イーサネット)でモーションコントローラを通信制御する5つのメリット
1、ノートパソコンなどの小型PCからすぐ、簡単に多軸モータ制御ができる
Ethernet(イーサネット) は、あらゆるコンピュータ機器を自由に接続し、ネットワークを構築できる通信技術です。
IEEE802.3 という国際標準規格の一部で、全世界で利用されています。
ほとんどのパソコンOS(Windows や Raspberry Pi を含む Linux)に、Ethernet を利用するためのネットワーク制御用ソフトウェアやハードウェアが組み込まれています。
そのため、汎用 Ethernet ポートに LANケーブルを差し込むだけで、どこでもどんな機器でも接続、データ通信が可能です。
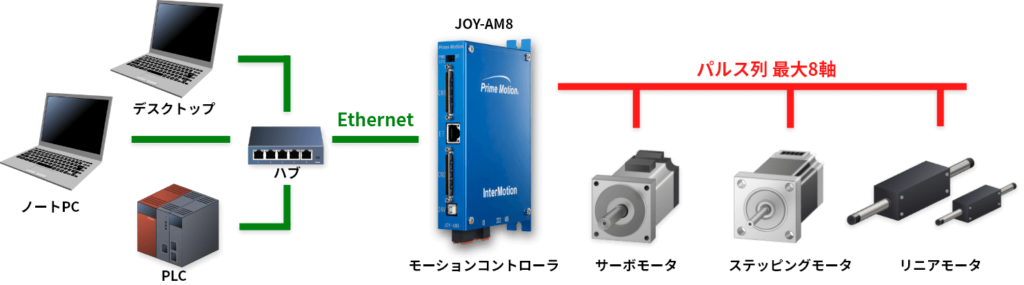
たとえば、汎用 Ethernet 対応モーションコントローラであれば、ノートパソコン搭載のLAN ポートや、USBポートに接続したLAN変換アダプタから、LANケーブルを介して接続します。
そして、パソコン側にモーションコントローラ動作アプリケーションをインストールし、任意のIPアドレスを設定します。それだけで簡単につながり、モータの位置決め制御や動作状況モニタリングが可能になります。

2、接続先のPLCやコントローラを自由に選択できる
汎用Ethernet対応モーションコントローラなら、どのメーカのPLCであっても、各PLCメーカ専用の通信規格でなくとも、汎用Ethernetポートを搭載していれば、LANケーブルを介して、様々なメーカのモータを回せます。
製造業の分野で、工場自動化のために用いられることの多い PLC(プログラム・ロジック・コントローラ)は、制御機能によって、電源ユニットやCPUユニット、モーション制御ユニット、ネットワークユニットというように、それぞれが独立した機器として提供されています。
それらのユニットを、装置の仕様に応じて組み合わせるのですが、基本的に同一メーカのユニット同士でしか接続できません。
加えて、各メーカが独自の通信規格や、その通信規格でのみつながるサーボドライバやモータなどの機器を開発しているため、すべての機器を望むままに接続することは困難です。
そこで、メーカや通信規格の壁を無くし、あらゆる機器同士を接続可能にするのが汎用Ethernet通信であり、汎用Ethernet対応モーションコントローラです。
多くのPLCメーカが汎用Ethernet対応ポートを持つ通信用のユニット提供しているので、汎用Ethernet対応モーションコントローラを通信制御することが可能です。
また、異なるメーカのPLCからや、パソコンやラズベリーパイからといった、複数の上位コントローラからのモータ制御も可能です。
\ 各社PLC、ノートパソコンにつながるモーションコントローラ /
3、高出力機器から発生するノイズに強く、誤動作しにくい
Ehternet対応機器は、Ehternetポートにパルストランスを使用し、電気的に絶縁されているので、ノイズに強くなっています。
モーションコントローラのような通信制御機器は、ノイズの影響を大きく受け、誤動作を起こす可能性があるので、ノイズ対策が非常に重要です。
そこで、Ethernetを通信手段として選択するだけで、標準搭載されているパルストランスによって、電気的に絶縁された結果、ノイズ対策になることは大きなメリットです。
ちなみ、弊社モーションコントローラの旧モデルは、汎用Ethernetポートに加え、USBポートも搭載していました。
USBはアドレス設定が不要で、ノートパソコンからすぐつながり、パラメータ調整も容易と考えたからです。
しかし、数十個のモータを使うような大規模な装置では、全軸サーボオフ中でも、多数のサーボドライバ内のスイッチング回路からのノイズがUSBポートに回り込んで、接続が確定しないという問題がありました。
モーションコントローラで制御するモータの軸数が少なく、モータドライバの電源電圧が低い場合などは、USB通信でも誤作動が起きる確率は低いと言えます。
しかし、AC200Vで多軸サーボ制御したいといったケースでは、ノイズに対して強いEhternetポートを採用したモーションコントローラを使用することをお勧めしています。
4、既存の制御装置に対して、容易にモータ制御軸を追加できる
汎用イーサネット対応モーションコントローラであれば、産業用PCやPLCをベースに開発された既存装置のイーサネットポートを利用して、簡単にモータ制御軸を追加できます。
パルス列位置指令出力のモーションコントローラであれば、様々なメーカのサーボモータやステッピングモータ、リニアモータを制御できます。
また、高速サーボネットワーク対応のモーションコントローラであれば、数十個のモータを制御することも可能です。
弊社では、最大8軸のモータ軸を同期制御できるパルス列位置指令出力タイプと、最大64軸のモータ軸を制御できる高速サーボネットワーク(RTEX)対応タイプ、そして、パルス列最大8軸、RTEX最大32軸、合計40軸制御可能なタイプの計3種類のモーションコントローラを提供しています。

PCIスロットやPCI-Expressスロットに空きがないけど、モータ制御軸を追加したい、既存装置で使用しているメーカのものとは異なるモータを回したい、といった方にもおすすめのモーションコントローラです。
\ パルス列も省配線サーボネットワークも使える /
5、通信プロトコルを使い分けることで、信頼性と高速性を実現できる
汎用イーサネット通信では、通信用途に応じて、2種類の通信プロトコルを使い分けることができます。
1つは、TCPという通信プロトコルです。
TCPは、ある程度時間がかかっても、大容量のデータでも、通信相手先機器と確実にエラーなく通信を行いたいときに使用します。
もう一つは、UDPという通信プロトコルです。
UDPは、比較的短いデータを、高速に送受信したいときに使用します。
信頼性という点ではTCPが、高速性という点ではUDPが優れています。
それぞれの特徴を理解したうえで、装置の仕様によって通信プロトコルを使い分けます。
ちなみに、弊社イーサネット対応モーションコントローラは通信相手機器によって通信プロトコルを使い分けています。
たとえば、三菱PLCとキーエンスPLCと汎用イーサネットで接続する場合は、MCプロトコルを利用します。
オムロンPLCと接続する場合は、FINSコマンドを利用します。
MCプロトコルとFINSコマンドは、高速通信が可能なUDPを使って、動作指令入力を周期的に監視します。
また、ノートパソコンや産業用パソコン、ラズベリーパイなどから汎用イーサネットで通信する場合は、TCPを使用します。複合的な移動動作指令とその応答、予防保全や動作状況モニタ用データを、確実に上位コントローラと送受信することが可能です。
こうすることによって、画像処理やデータ処理、コントローラ間通信などは上位コントローラに任せて、高速性、精密性、同期性を求められるモーション制御演算処理は、モーションコントローラに任せることができます。
機器の役割分担、負荷の分散が可能です。
\ 実際の動作の様子を動画で解説しています /
まとめ(+汎用イーサネットと産業用イーサネットの違い)
今回は、汎用イーサネットでモーションコントローラを通信制御する以下の5つのメリットをご紹介しました。
- ノートパソコンなどの小型PCからすぐ、簡単に多軸モータ制御ができる
- 接続先のPLCやコントローラを自由に選択できる
- 高出力の機器から発生するノイズに強く、誤動作しにくい
- 既存の制御装置に、容易にモータ制御軸を追加できる
- 通信プロトコルを使い分けることで、信頼性と高速性を実現できる
現在の製造分野では、EtheNet/IP、PROFINET、EtherCAT、CC-Link IEといった産業用イーサネットが普及してきています。産業用イーサネットは、汎用イーサネットでは実現できなかった、決められた時間に決められた機器との通信を完了するという、『確定性』を担保するように開発されました。
しかし、『確定性』が担保されないから使えないかというと、そうではありません。
装置の仕様によっては、汎用イーサネット通信で充分、むしろ産業用イーサネットを採用しても、オーバースペックだったり、機器接続の自由がなくなってしまったり、よりコストがかかるという場合もあります。
弊社のEthernet対応モーションコントローラは、PLCやPCなどの上位コントローラから、汎用イーサネットでモーション制御をしたいというご要望にお応えしています。
\ そのお悩み、Ethernet対応モーションコントローラで解決できるかもしれません /
詳しい製品内容・仕様を見る