安いステッピングモータや安いACサーボを
簡単に回す方法とは
株式会社プライムモーション 代表取締役 片桐 崇
ニックネーム『モーションおやじ』
モータ制御開発35年目
このページに初めてお越しの制御システム屋さん
「23bitエンコーダの高性能サーボは不要だ」
「2500パルスのサーボで安く作りたい」
「IAIステージも動かして、メカ設計を簡単にしたい」
「減速機付きのオリエンタルのステッピングモータも使いたい」
「安い2相ステッピングモータも使いたい」
制御屋さん
「移動動作を事前登録して、パラレル起動したり、Modbusで通信起動したりするのが面倒」
「難しいプログラムを書くのは嫌だ」
「マイナーなプログラム言語を学習するのは嫌だ」
「PCIスロット付きの大きなパソコンは使いたくない」
「安い低機能モータコントローラを採用して、すぐ限界、乗り換えの繰り返しも嫌だ」
そう、お考えかと思います。
良い解決策が見当たらない。
高く、難しくて当たり前だ。
とお考えかと思います。
確かに、”このページを見るまでは”、そうでした。
しかし、当社はその業界常識をひっくり返しました。
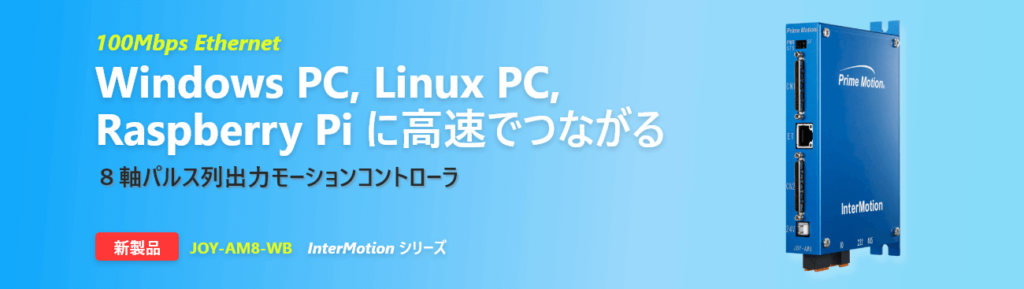
パルス列位置指令で8個のモータまで、
一箱のユニットで、自由に制御できるようになりました。
その製品は『InterMotion(インターモーション)』といいます。


突然ですが、Windowsのノートパソコンは今、お持ちですか?
お答えが『YES ! 』なら、良い方法があります。
次に、そのパソコンにLANのポートは、ありますか?
無ければ、USB-LAN変換アダプタを挿してください。
そのLANポートと青いモーションユニットの
『InterMotion(インターモーション)』をLANケーブルで接続してください。

『InterMotion(インターモーション)』は、
ノートパソコンから8個のモータ駆動装置に対して、
移動したい目標の位置に対応した数の電気信号の位置指令パルスを出力します。
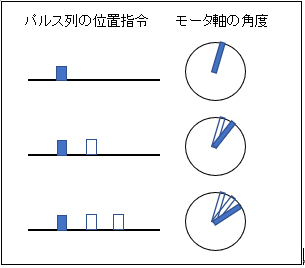
パルス列で、位置決め、モータ制御
電気信号の位置指令パルスでモータを回すことは、超簡単です
1パルスで6度回るモータなら、
電気信号の1パルスで、モータのシャフトが6度回ります。
2パルスを出力すれば、6度の2倍の12度回ります。
とても簡単です。
パルス列の位置指令でモータを回すことは、30年以上前から業界標準です
安いステッピングモーターも、最先端の超高性能なサーボモーターも、
すべてパルス列位置指令で回せます。
業界のみんながパルス列位置位置指令の機器を育ててきました。
安くてコストパフォーマンスの良いモータ制御機器がいっぱいあります。
だれも文句のつけようがないオープンインターフェース。
パルス列の位置指令は、守備範囲が一番広いのです。
とてもお得です。
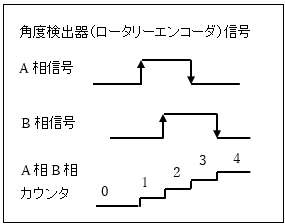
回った角度を検出する機器(エンコーダ)の標準A相、B相信号カウンタも装備してます
『InterMotion(インターモーション)』は、回ったモータの角度を検出するための、
標準的な信号のA相、B相信号を入力する回路を備えています。
A相信号、B相信号の変化点にて、
1つずつカウントするA相相カウンタも標準で内蔵しています。
エンコーダ分解能の詳しい解説です↓
横幅は1/5以下。大幅に小型化、低コスト化を実現しました
LAN付きCPU、8軸パルス列発生、8軸A相B相カウンタが一体になりました。
同程度の性能を持つ他社コントローラと比較して、サイズもダウン、コストもダウン。
横幅はなんと、1/5以下です。

『InterMotion(インターモーション)』を、
同等機能を実現可能なシーケンサ(PLC)という制御機器と比較してみます。
- Ethernet付きCPUユニット
- 4軸パルス列位置指令ユニット
- 4軸パルス列位置指令ユニット
- 4軸高速カウンタユニット
- 4軸高速カウンタユニット
の5つがプリント基板1枚にまとまって、
より小型で、より低コストなコントローラです。
高性能の集積回路と高密度なコネクタが小型化のカギです。
1つのコネクタから68本、
2つのコネクタを合わせると、136本の線が出ています。
8個のモータに対して、
時計回転パルス信号、反時計回転パルス信号があります。
また、角度検出器用のA相信号、B相信号の入力があります。
加えて、モータ制御に必要十分な信号
- 励磁オン出力信号(モータにトルク発生を許可する信号)
- ドライバアラーム入力信号
- ドライバアラームリセット出力信号
- エンコーダZ相入力信号
- +側リミット入力信号
- -側リミット入力信号
も入っています。

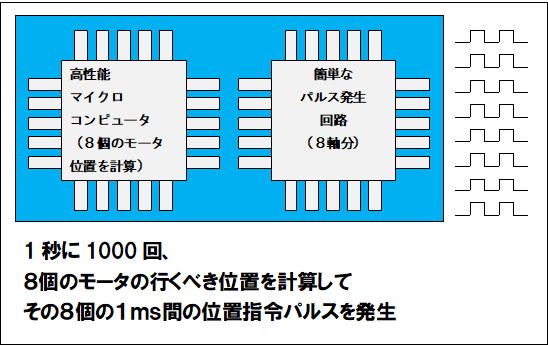
シンプルなモータコントローラエンジン
モータコントローラ『InterMotion(インターモーション)』は、
主に2つのIC(集積回路)
- 高性能マイクロコンピュータ
- 簡単なパルス発生回路(FPGA)
より構成されています。
高性能マイクロコンピュータでは、
1秒間に1000回(1ms)ごと、
8個のモータの行くべき位置を計算しています。
その計算値が得られたら、
簡単なパルス発生回路で、パルスを発生させて、
位置指令を出力しています。
構成はシンプルですが、
長年かけて開発してきたモータ制御ソフトウェアを実行することによって、
高性能なモータコントローラを実現しています。
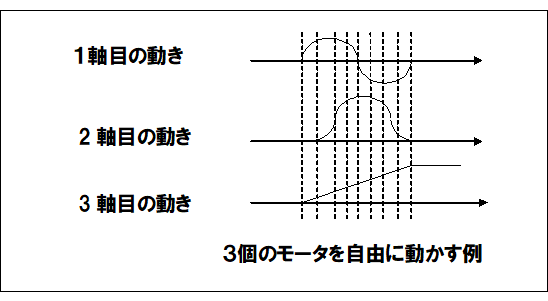
高性能マイクロコンピュータのソフトウェアで、
行くべき位置を計算しているので、
モータの動かし方は、自由。
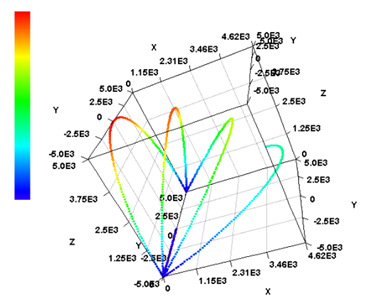
以下のような3個のモータが特別に関係しあう動きも実現できます。
また、XYZステージで、3次元の丸いカーブを描くことも可能です。
安いサーボやIAIステージやオリエンタルに接続
以下のモータドライバに接続した『InterMotion(インターモーション)』が日夜世界中で動いております。
- IAI社 SCON-CA-**I-NP-*(パルス列制御モード、正転パルス、逆転パルス)
- IAI社 PCON-CA-**PI-NP-*(パルス列制御モード、正転パルス、逆転パルス)
- IAI社 ACON-PL-**I-NP-*(正転パルス、逆転パルス)
- オリエンタル ARLシリーズ パルス列入力タイプ(正転パルス、逆転パルス)
- パナソニック社 MINAS-Eシリーズ(2500パルスのサーボ、正転パルス、逆転パルス)
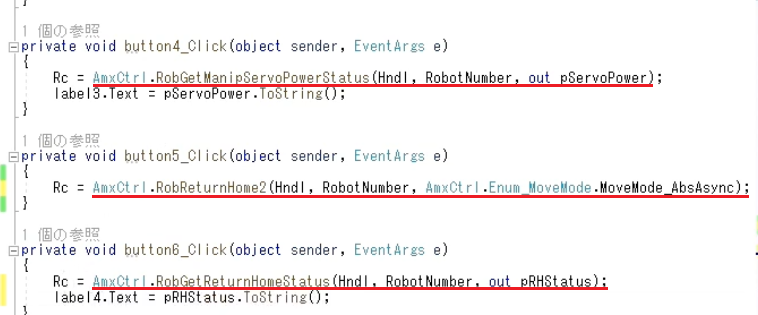
簡単で使いやすいソフトウェアライブラリー
たとえば、Visual Studio 2019 CommunityのC#環境で参照設定します。
- 励磁オン(サーボオン)
- 原点復帰
- PTP移動
などのメソッドが用意されています。
8軸パルス列小型モータコントローラ
ここまで、
8軸のパルス列位置指令
しかも、
Ethernetがついた、
一箱ユニットのモータコントローラ「InterMotion」について
ごくごく簡単にご説明しました。
まだまだ、ご説明したいことがありますが、
「InterMotion」には、あなたの想像はるかに超えた世界があります。
このページを「小さい会社だから」、「無名だから」と無視するのは、簡単です。
しかし、
- LAN一本で簡単接続
- 簡単なプログラム
で、
8軸のパルス列位置指令制御ができてしまう技術が目の前にあります。
いかがされますか。
詳しい製品内容・仕様を見る

パルス列で高精度モーションコントロール
さてここからは、
機械装置メーカのエンジニアの方へ
アマチュア向けの製品とお思いかもしれません。
しかし、プロ向けのご説明はこれからです。
いあままで「モータ」コントローラとして説明してきました。
これからは、高機能「モーションコントローラ」としてご説明いたします。
InterMotionは、内部にモーション制御プログラムを記述することができます。
今のところ、正直に言えば、マイナー言語ですが、
お客様がプログラムを書くことによって
以下の1msのばらつきの、
自由な高速応答動作を手に入れることができます。
Input、Output連動モーション
『InterMotion(インターモーション)』は緑のコネクタがあります。
ここには、汎用のInputポート、Outputポートがあります。
このInputポート、Outputポートは、
モータの動き(モーション)と、1ms周期で
関連させることができます。
応用例をいくつかご紹介します。

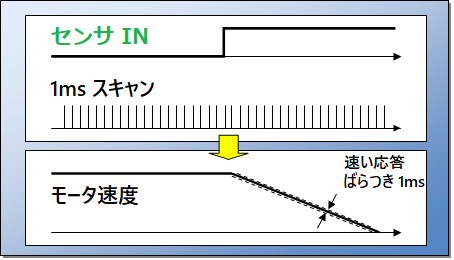
センサINで減速停止(1msばらつき)
センサ入力を1msスキャンして、減速停止、ばらつきは1ms以内。
システムシフトがセンサINを監視して
自動的に減速を開始します。
お客様のプログラムは、
そのINポートをどの軸の減速停止信号とするかの
割り当て設定だけです。
もちろん、センサINでモータ移動開始の機能もあります。
押し込み軸の圧力センサに適用
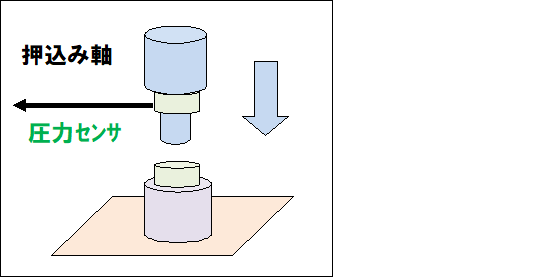
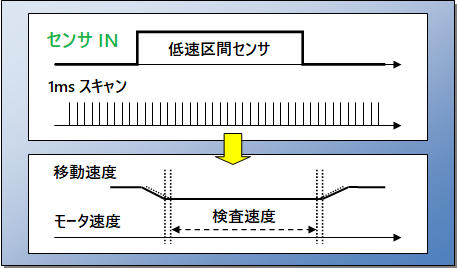
センサIN区間で定速(1msばらつき)
搬入、搬出は高速。検査ステーションでは定速。
減速タイミングを可能な限り、遅らせて、
加速タイミングを可能な限り、早めて、
定速時間を最小限にして、タクトを最大限に上げる。
こんなことも簡単です。
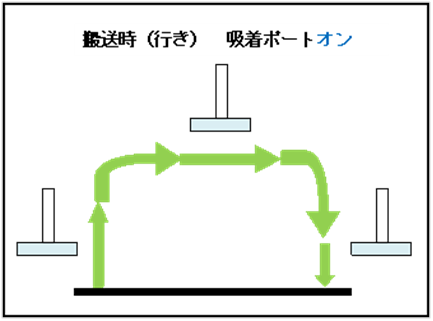
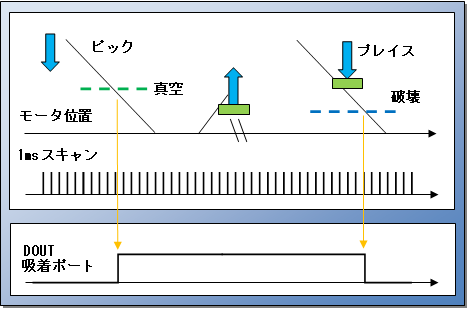
ピックアンドプレイス動作中の指定位置でDOUT(1msばらつき)
ピック時、指定位置で早めに吸着ポート真空ON。プレイス時、指定位置で早めに真空破壊。
システムシフトがモータの位置を監視して、自動的にDOUTポートがON、OFFします。
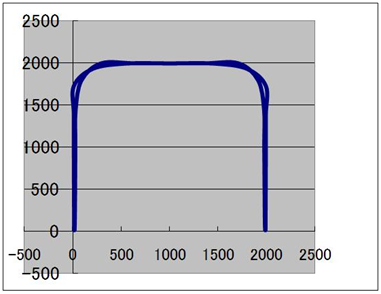
アーチモーション(ゲートモーション)(1msばらつき)
XYZステージで、安定したアーチ状(門形)のモーションが可能。
Z軸上昇している途中で、Z軸の下降開始。
システムシフトが位置を1ms周期で、
監視しながら、途中から、
他の軸の移動を開始します。
XYステージ、YZステージでも可能です。
半導体製造装置工程、小型電子部品組立てにて、
門の形を停止することなく、スピーディに移動します。
前述の、指定位置でDOUT機能を合わせて使えば、吸着ポート制御が連動します。
ICや小型電子部品のピックアンドプレース作業に最適です。
内部プログラム例(アーチモーションの例)
アーチモーションのプログラムは、
pos_pick_topなどに目標位置を代入後、
以下の4行だけ。
RobSetOverlap(Rob1,50); //オーバーラップ命令
RobPtpMove(Rob1,pos_pick_top,3) //上昇移動命令
RobPtpMove(Rob1,pos_place_top,3) //水平移動命令
RobPtpMove(Rob1,Pos_place,1) //下降移動命令これだけ。
PTP移動命令を3つ書いて、
その前に、便利な命令を書きます。その名前は
「ロボ セット オーバーラップ 命令!」
位置決め監視、アラーム監視はシステムソフトが担当。
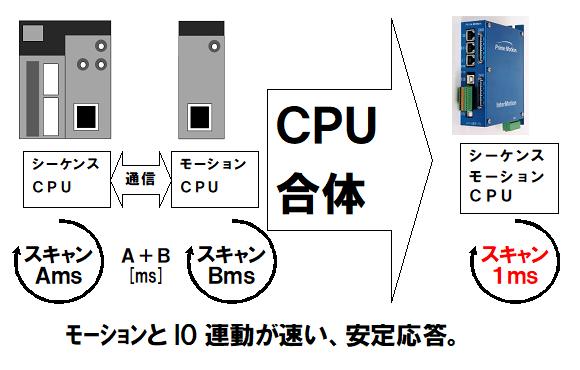
シーケンスCPUとモーションCPU合体で安定応答、しかも、パルス列位置指令可能
InterMotionは、1つのマイクロコンピュータで、
モータの動き(モーション)の計算と
Inputポート、Outポートの制御を行います。
そのため、2つのCPUを使ったシーケンサ構成に対して、
きわめて安定して1msの応答が可能です。
しかも、InterMotionは、
8軸のパルス列位置指令が可能です。
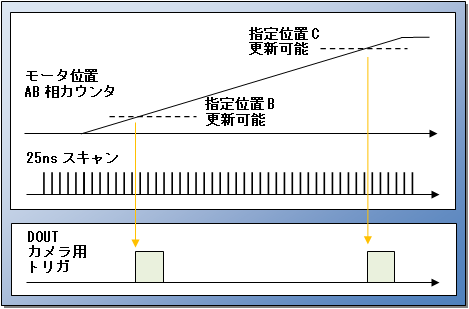
AB相カウンタサンプリングのカメラトリガ出力(25nsばらつき)
InteMotionは、エンコーダのAB相カウンタを標準で8軸分搭載しています。
このカウンタを40MHz(25nsナノセコンド)監視して,
指定位置でワンショットのカメラ用トリガ出力も可能です。
RS232とRS485
コントローラ底面に
丸いコネクタでRS232C、四角のLANコネクタでRS485
を用意しています。
内部制御プログラムで、通信制御が可能です。

詳しい製品内容・仕様を見る
さらに高速、高精度を求めるなら、Windowsリアルタイム制御
モーションコントローラの開発を始めて、21年目、
十分成熟しています。
21年間鍛えられています。
InterMotion(インターモーション)は、出荷開始は2009年。
液晶製造、液晶検査、半導体製造後工程、食品加工、人工衛星用モータ検査、など多くの使用実績があります。
また「InterMotion」で覚えた
- モーションコントローラの知識
- 機械制御プログラムの知識
- ソフトウェアツールの使用経験
は、パソコンに当社製PCIカード、PCI-Expressカードを挿した
Windows10-64bitパソコン版モーションコントローラにも展開できます。
超高速の機械制御装置を作りたい場合に、お手伝いさせていただきます。
8軸のパルス列位置指令コネクタは、同じ信号配置です。

まだまだ、先がありますが、
ご説明が長くなるので、ここまでとします。