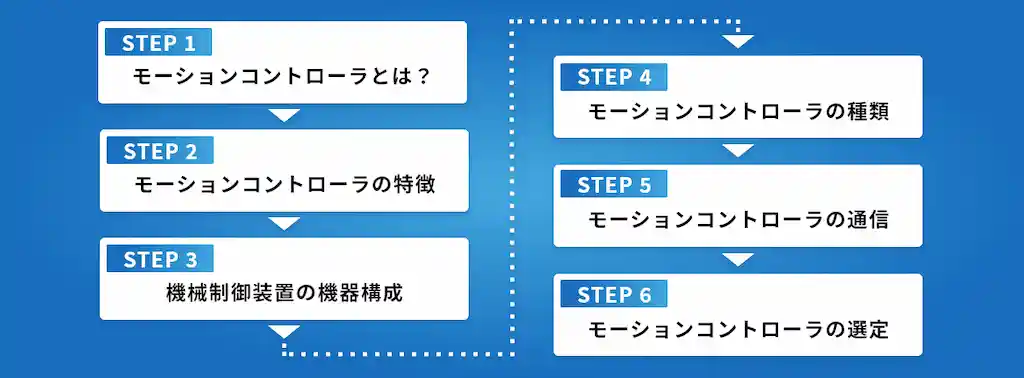
モーションコントローラ選定のための6ステップ
ひとえにモーションコントローラといっても、取扱いメーカも様々で、製品の機能や性能、特徴もさまざまです。
そして、モーションコントローラは制御の心臓部と言ってよいほど重要な機器ですが、機械制御装置を構成する機器類のほんの一部分でしかありません。
ですので、選定する際には、コントローラそのものの性能はもちろんのこと、周辺機器との接続性、通信方式なども考慮する必要があります。
具体的には、
- 上位コントローラや下位デバイスにあたるサーボ機器はどうするか
- どのように機器同士を接続し、ネットワークを構成するか
- どんな種類のモータやアクチュエータを制御するのか
- ワークの動作速度や精密さはどれくらいを求めるのか
- 使用するプログラミング言語や開発環境はどうするか
等々に注意を払う必要があります。
この記事では、サーボ業界35年以上の開発経験豊富なモーション制御のプロ(モーションおやじ)が、まずモーションコントローラとはどのような機器なのかをご説明します。
そして、複雑に制御機器が絡み合うモータ制御システムにおいて、予算や生産性、接続性、目的とする動作も含め、どのような基準をもってコントローラを選定すればよいのか、簡単にわかりやすく説明します。
\ モーションコントローラとは? /
モーションコントローラとは?
「モーションコントローラ」=「複数のモータを同期制御できる機器」
モーションコントロール(motion control)は、「モノの動き(移動)」を「制御する」ことを意味します。
つまり、モーションコントローラ(motion controller)とは、「モノの動きを制御する物(機器)」のことです。
実際には、複雑・高速・高精度で滑らかな多軸モーション制御を可能にする産業用コントローラを指します。
数nmから数μmの精度を必要とする半導体製造・検査装置、工作機械などの産業用FA装置から、簡単省力化機械まで幅広く、装置の中核として組み込まれ、モータ制御の司令塔として動作します。
モーションコントローラの特徴
モーションコントローラの一番の特徴は、多軸のモータを同期(協調)制御できることです。
多軸同期制御はなめらかな補間制御、たとえば、2次元平面や3次元空間における直線、円弧、連続軌跡、らせん補間を可能にします。
さらには、ある軸が一定方向に回転しながら、他の複数軸が往復運動するトラバース動作、また、電子カム動作なども可能です。
PLCや位置決めコントローラでは実現困難な、高精度、高速で多軸のモータを同期させて動作させる制御や、複数軸での期待通りの加減速、速度、軌跡を軽々と実現するのがモーションコントローラなのです。
さらに高機能なモーションコンローラも販売されており、モータの動きとIN、OUT、AD、DAの動きを連動(同期)させることも可能です。
\ プライムモーションの製品はこちら /
機械制御装置の機器構成
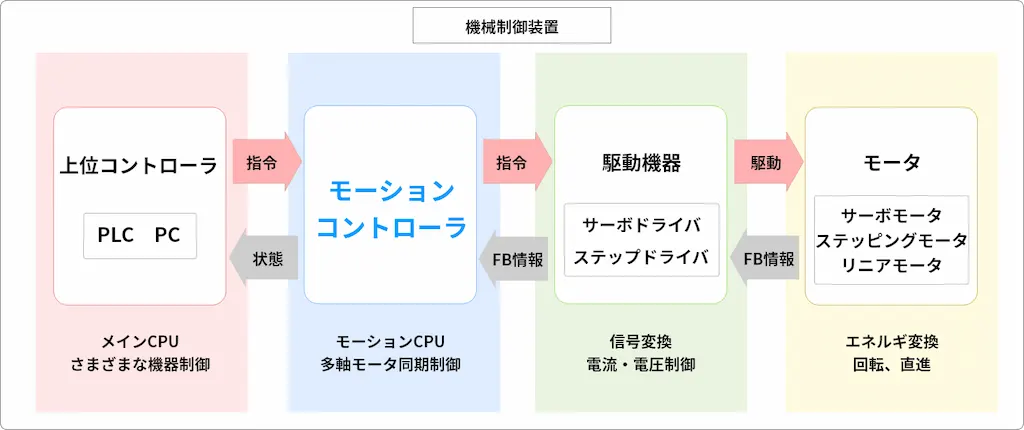
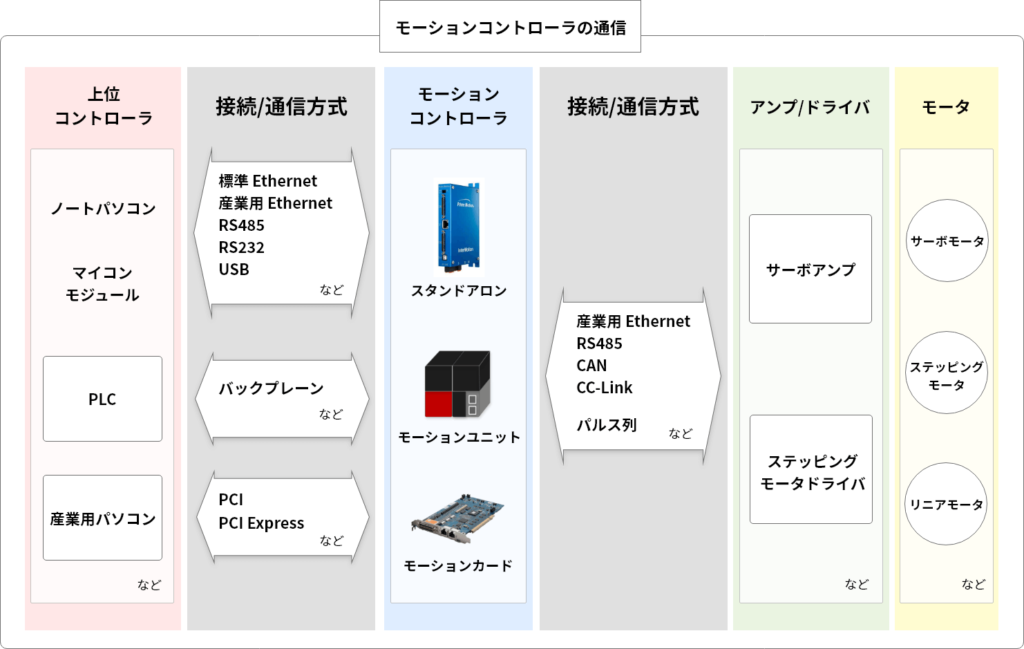
機械制御装置は、特にモータ制御部分については、上の図のように、モーションコントローラを制御の中心として、異なる役割を持った機器を組み合わせたモータ制御システムです。
その構成要素は主に、上位コントローラ、モーションコントローラ、駆動機器(サーボドライバ、ステッピングモータドライバ)、モータ(サーボモータ、ステッピングモータ、リニアモータ)の4つです。
\ 実際の装置を使って解説しています /
上位コントローラ
HMI(ヒューマン・マシン・インターフェース)、画像処理、データ収集、汎用I/O、センサ、スイッチ動作、ネットワーク通信など、モータ制御以外の制御も担当します。
モーションコントローラと通信し、制御命令を発行します。
モーションコントローラ
上位コントローラからの指令やサーボドライバからのフィードバック情報をもとに演算処理をして、各サーボドライバに対して制御信号を出力します。
駆動機器(サーボドライバ、ステッピングモータドライバ)
サーボアンプとも呼ばれます。
モーションコントローラから入力した制御信号を、電流を制御しながら電圧に変換し、モータ駆動します。
モータ1つにつき、ドライバが1つ必要です。
1つの駆動機器の中に、複数台のモータを回す回路が組み込まれている場合もあります。
モータ(サーボモータ、ステッピングモータ、リニアモータ)
入力された電力をモータシャフトの回転運動や移動子(可動部)の直線運動に変換します。
また、回転運動を直線運動に変換する直動ステージや必要トルクを得るための減速機などと併用します。
モータシャフトの回転角度をしるためのエンコーダ(角度検出器)と呼ばれるセンサが付属します。
リニアモータの場合には、位置を知るためのリニアスケールが付属します。
そのほかに、I/O装置、カメラ、センサ、入出力インターフェース(HMI)などを、モーションコントローラに接続する場合もあります。
モーションコントローラーの種類
モーションコントローラの種類は大きく分けて3つあります。
PLC用のモーション制御ユニットタイプ、独立動作可能のスタンドアロンタイプ、産業用PC用のモーションカード(モーションコントロールボード)タイプがあります。
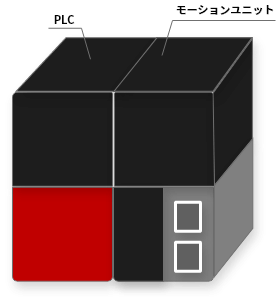
PLC用モーション制御ユニットタイプ
PLC専用のモーションコントローラです。PLCを製造装置のメインコントローラとして、PLCだけでは実現できない多軸高速同期モーション制御を可能にします。
各PLCメーカ(三菱電機、キーエンス、オムロン、安川電機など)がそれぞれのPLC専用モーションユニットを開発・販売しています。
PLCとの通信には各社独自の通信規格や接続方式を用いており、簡単に接続、高速通信制御が行えて、PLCとモーションコントローラー両者のメリットを享受できます。
制御プログラムには、ラダープログラムやSFC(Sequential Function Chart)などを使用します。
既にPLCを使っている場合に導入しやすくなっています。
\ 各社PLCにつながるモーションコントローラ /
スタンドアロンタイプ(独立動作も可能なタイプ)
大手PLCメーカ以外の制御機器開発・販売会社がさまざまなタイプや性能の製品を世に送り出しています。
そのため、PLC、産業用パソコン、ノートパソコン、ラズベリーパイなど、上位コントローラを自由に選択できます。
名前の通り、電源を供給しさえすれば、上位コントローラーを必要とせず、単独で稼働することもできます。
数nmオーダーの緻密な制御や、サブμmオーダーの高速な制御を必要としない、数軸の小規模から数十軸程度の中規模な制御装置を構築する際に使用されます。
モーション制御がメインで、ちょっとしたI/O動作やAD/DA動作をしたい場合に、コンパクト、低コストで実現できます。
内部制御プログラムは、メーカー独自のもの、また一般的なC言語など多言語に対応しています。

\ 実際に動かすイメージが湧きます! /
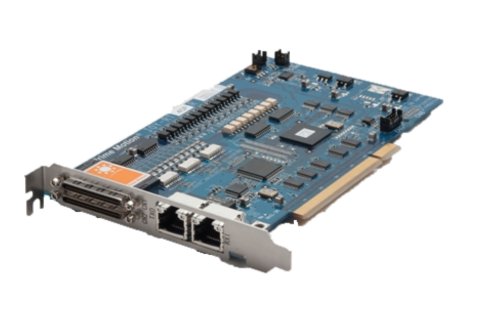
産業PC用カードタイプ
モーションカード、モーションコントロールボードとも呼ばれます。産業用パソコンのPCIやPCI Express と呼ばれるスロットに差し込んで使用します。
スタンドアロンタイプでは実現できない、つまり、マイコンのパワーでは物足りない、大規模で高速なモーション制御を行う装置向けです。
モーションカードはパソコンのメインCPUのスレーブとして使用されます。
モーションコントローラーメーカによっては、パソコンとモーションカードに加え、WindowsOSをリアルタイム化できるソフトウェア(RTXやINtime)もセットで販売しています。
汎用パソコンにインストールされたWindowsのリッチなGUIやファイル操作、文字データ処理通信性能、豊富なアプリケーションを利用しながらも、同時に定周期性(リアルタイム性)を確保し、高速、高精度の多軸モーション制御を実現できます。
また、産業用PCのスロットに画像検査のための高画素カメラ用カードを接続したり、高精度位置決めのためのGigEカメラ用カードを増設したり、I/Oカードを接続できたりとカスタマイズ性も抜群です。
追加でEthernetやUSB経由でスタンドアロンタイプのモーションコントローラーを接続すれば、制御軸数追加要件にも対応できます。
以上、PLC用モーション制御ユニットタイプ、スタンドアロンタイプ、モーションカードタイプの3種類のモーションコントローラーをご紹介しました。
それぞれ、接続先の上位コントローラの種類は異なりますが、共通する点があります。その一つが、モーションコントロールソフトウェアです。
モーションコントロールソフトウェアとは、直線補間や円弧補間のように、複雑で同期的な軌跡制御を行う際に必要なソフトウェアです。高度な演算処理と、リアルタイム性を確保したデータの入出力を可能にします。
リアルタイム性を担保するためのマイクロプロセッサを使用したユニットタイプやスタンドアロンタイプには、ITRON(アイトロン)といったRTOS(Real Time Operating System)が使用されています。また、産業用PCの場合は、RTXやINtimeといったWindowsリアルタイム拡張OSが使用されています。
モーションコントローラ―の通信(指令、情報のやりとり)
上位コントローラとの通信
上図のように、モーションコントローラーの種類によって、接続先の上位コントローラの種類が異なります。
そして、上位コントローラによって求められる通信方式(通信規格)も異なります。
PLC専用モーション制御ユニットの場合
モーション制御ユニット(モーションモジュール)開発元のPLCメーカのPLCに接続します。
三菱電機、オムロン、キーエンス、安川電機など各社PLCメーカは、制御装置に要求される様々な動作に対応できるよう、豊富なユニットを揃えています。CPUユニットをはじめ、電源ユニット、入出力ユニット、ネットワークユニット、そしてモーションユニットなどがあります。
それらを簡単に接続するための機器が用意されており、それをバックプレーンユニット、またはベースユニットと呼びます。バックプレーンユニットを省略したビルディングブロックタイプもあります。
通信方式は各PLCメーカに依るので、自分で選択する必要がありません。
\ 実は、汎用Ethernet通信なら他社製品にもつながります /
スタンドアロンタイプの場合
PLC、産業用パソコン、ノートパソコン、マイコンモジュールなどに接続できます。
接続には、USB、Ethernet(標準イーサネット or 産業用イーサネット)、RS232、RS485などの通信規格を使用します。
それぞれの規格によって、通信処理方法、伝送速度、伝送可能距離が異なってきます。
実現したい動作に必要十分な仕様のものを、各モーションコントローラーメーカの中から比較検討して、選択します。
\ 弊社製品は汎用Ethernet通信に対応しています/
産業PC用モーションカードの場合
産業用パソコンに接続します。PCI、PCI Expressで通信します。
産業用イーサネットとは、日常生活でパソコンをインターネットに接続する際に用いる、標準イーサネットを改良した通信規格の一つです。定周期性(リアルタイム性とも呼ぶ)やノイズに対する安定性(または信頼性)が必要な、産業用の制御装置、制御システムのために開発されました。
産業用ネットワーク、または産業用フィールドネットワークなどとも呼ばれ、代表的なものに、PROFINET、EtherNet/IP、EtherCAT、Modbus/TCP、MECHATROLINK、CC-Link IE Field、Realtime Express(RTEX)などがあります。また、機器間の接続には、シールド保護された一般的なLANケーブル(CAT5e STPなど)を使用する場合と、対象の通信規格専用に開発されたケーブルを使用する場合とがあります。
下位アンプ/ドライバとの通信
大きく分けてパルス列位置指令出力か、シリアル通信か、に分かれます。
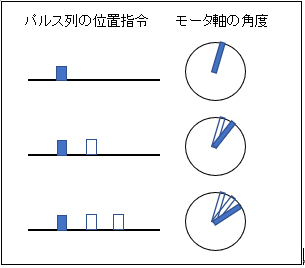
パルス列位置指令出力
モータを回す最もシンプルかつ簡単、標準的な通信方式です。
アンプもモータも、モーションコントローラも低価格なので、システムを低コストで、マルチベンダで構築できます。
出力したパルスの数だけ、モータが回転します。
パルス出力の周期でモータの回転速度が決まります。
一般的に、ステッピングモータを回す際に用いられる通信方式ですが、サーボモータやリニアモータも回せます。
パルス列位置指令入力対応のサーボドライバ(サーボアンプ)を選択します。
\ 最大8軸のモーション制御が可能 /
シリアル通信
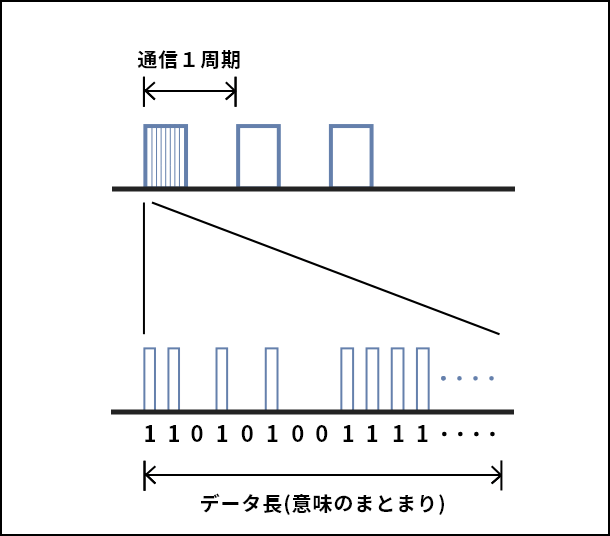
電圧のHigh、Lowレベルを、bitの1、0に対応させた通信です。
通信1周期の中に、「1,0,1,1,0,0,0,…..」といった意味のある情報のまとまりを、複数セットまとめて送受信します。
RS485、CAN、CC-Link、産業用イーサネット(EtherNet/IP、EtherCAT、CC-Link IE Field、MECHATROLINK-Ⅲ、RTEX、…)などの産業用ネットワークが使用されています。
省配線で複数のサーボドライバを接続して、多軸のモータを制御したいときに導入されます。
\ 高速サーボネットワーク RTEXで最大64軸制御 /
まとめ
今回の記事では、以下の内容をご紹介しました。
- モーションコントローラとは?
- モーションコントローラの特徴
- 機械制御装置の機器構成
- モーションコントローラの種類
- モーションコントローラの通信
いかがでしたでしょうか。
- モーションコントローラの選定方法(どんなポイントに着目して比較・検討するべきか)
については、以下の資料をダウンロード!
モーションコントローラ
選定ガイドを読む