



新着情報・お知らせ
製品・ソリューション

お役立ちコンテンツ


お客様サポート・ダウンロード資料
お問い合わせ
「商品について」「機能の実現性」「価格・お見積もり」など、お気軽にお問い合わせください。
経験豊富な技術スタッフが、迅速にサポートします。
電話でのお問い合わせ

(受付時間:平日 9:00〜17:00)

「商品について」「機能の実現性」「価格・お見積もり」など、お気軽にお問い合わせください。
経験豊富な技術スタッフが、迅速にサポートします。
電話でのお問い合わせ
(受付時間:平日 9:00〜17:00)
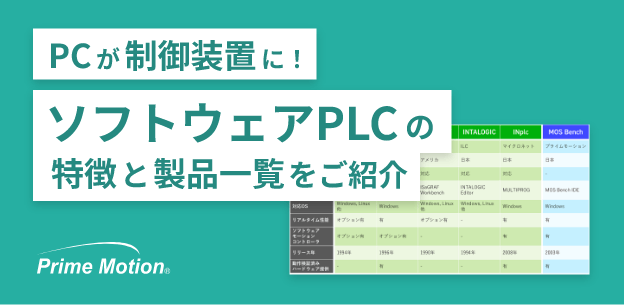
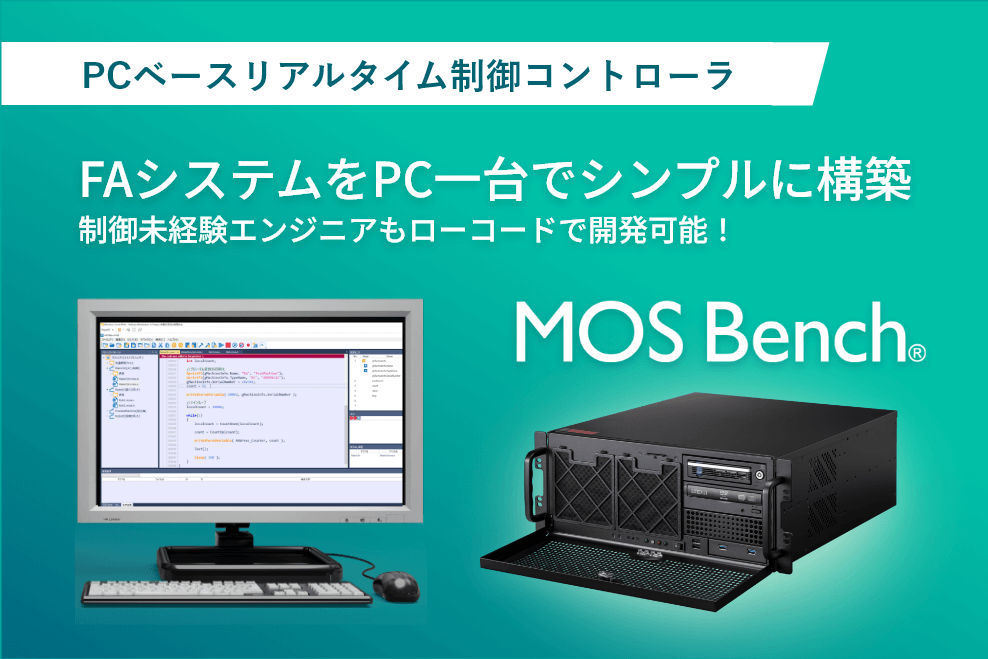
産業パソコンとソフトウェアPLCで
高速な機械制御装置を簡単に作る方法
