

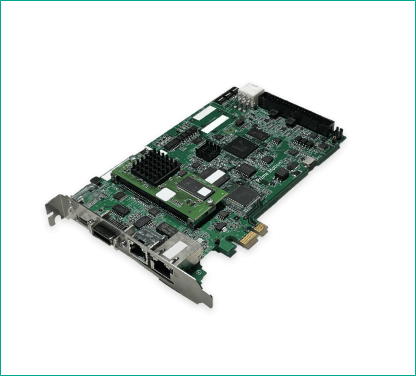
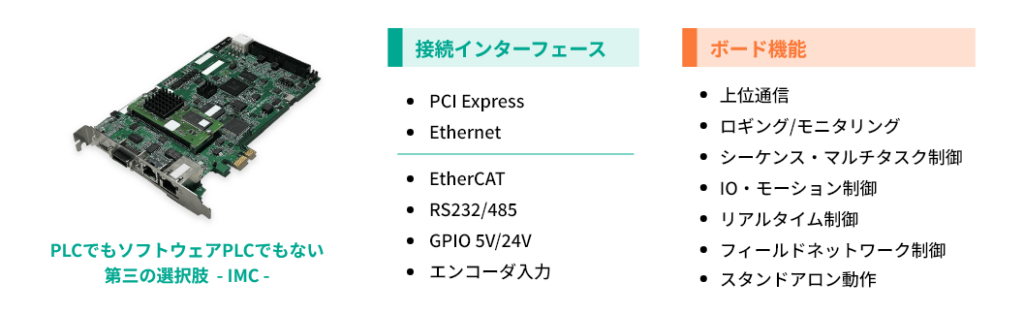
PCI Express対応 EtherCATマスタ搭載リアルタイムマシンコントローラ
製品名称:IMC(Intelligent Machine Controller)
脱PLC。ソフトウェアPLCの不安も解消。Windows PC上で安定動作する、新しいリアルタイム制御ボード。
IMC の特徴
- 高性能CPU搭載で、OSに依存しない安定制御を実現
- Visual StudioでC++/C#/VB開発が可能。ラダー言語は不要。
- PCI Express接続で、PCアプリと高速通信が可能。
- 半導体装置・産業機械向けに最適化された専用制御ボード
- ユーザーアプリと分離した制御で、既存のPCアプリ資産を流用可能。
IMCは…
IMC(Intelligent Machine Controller)は、Windows PCにPCI Express経由で接続するリアルタイム制御ボードです。制御処理はボード上の専用プロセッサで独立して実行され、OSの負荷や挙動に影響されることなく、高速かつ安定した動作を実現します。
Windowsのアップデートや新たなアプリケーションの導入後も、再設定やチューニングは不要。制御系とPCアプリケーションの役割を明確に分離することで、高信頼性とシステム設計の柔軟性を両立します。

PCベース制御、導入の壁を感じていませんか?
半導体製造装置や産業機械などに、PCベース制御を導入しようとして
「こんな壁にぶつかったことはありませんか?」
多くの現場が直面している、代表的な3つの導入課題

PCを自由に選びたいのに、
結局ハードに縛られる
ソフトウェアPLCを導入しても、リアルタイム性を確保するには結局PCごとのチューニングが必要。
『どのPCでも動く』は理想論で、選定や運用の自由度は限定されがちです。

『本当に安定動作するの?』
という不安がある
WindowsやRT拡張での制御は、OSアップデートなどの影響を受けやすく、現場での動作や信頼性に不安がある。
長時間・無人運転が前提の制御では、”安定動作の保証”が必須です。
PLCとPCアプリ、
分離された開発に疲れている
機械制御はPLC、画像処理やUI、上位通信はPCアプリ。異なる言語・環境で2重開発が必要になりがちです。
アプリ間通信も複雑で手間が増え、開発工数が膨らみます。

これらの課題を、IMCが解決します。
IMCと従来型のコントローラとの違い
PLCでも、ソフトウェアPLCでも、モーション制御ボードでもありません。
ハード制御の安定性とソフト開発の柔軟性を両立する、第3の選択肢 —
それがIMCです。
IMCと従来型コントローラの違いを比較しました。以下をご覧ください。

※ 産業用PCベースでリアルタイム制御システムを構築することを想定して比較
新しい制御ボード『IMC』の5つの特徴をもって
現場の課題を解決します。
1.PC選択の自由度
PCI Express またはLAN接続に対応しており、専用筐体に縛られず、自由なPC選定が可能。
機器構成の柔軟性を大幅に向上させます。
2.開発容易性・統合性
Visual Studioで、C++やC#/VBを用いた統合開発が可能。IMC内部プログラマブルコントローラ開発用ツールもご用意。
PCアプリと制御ロジックの連携もスムーズで、開発工数を削減します。
3.リアルタイム性能・安定性
標準搭載のEtherCATマスタにより、I/Oやモーション制御デバイスを一括接続。
配線をシンプルに、システムをスマートに構築可能。
4.オープンネットワーク対応
PCI Express またはLAN接続に対応しており、ハードウェアチューニング不要で、自由なPC選定が可能。
機器構成の柔軟性を大幅に向上させます。
5.PC障害時の継続動作
制御はIMCが自律的に実行。
Windowsが停止しても制御は継続され、安全な停止動作が可能です。
IMCを導入すると得られる3つの効果
IMCは、単なる制御ボードではありません。
導入によって、開発・運用・保守のすべてにおいて大きな効果をもたらします。
ここでは、IMCが実現する3つの代表的な導入効果をご紹介します。
①
ハードウェア選定の自由度が広がる
IMCはPCI Expressスロット搭載PCであれば、どんな構成にも柔軟に対応できます。そのため、専用ハードに縛られない、最適なPC選定が可能になります。
また、スタンドアロン動作機能も実装しているため、PCI Expressスロットの余裕がないPCや、そもそもスロットを搭載していないPCに対しても、Ethernetで接続して、リアルタイム制御機能を拡張できます。

②
開発負荷とシステム統合の煩雑さが削減される
IPCアプリも制御アプリもVisual Studio上で開発可能です。また、モータ制御やIO制御などのモーション制御部分は、配線とともにEtherCATで統合できるので、開発工数およびシステム構成の簡素化に貢献します。
IMCに搭載されたプログラマブルコントローラ『MOSbench』を使用した開発で、さらに高速な機械制御を実現できます。

③
信頼性・長期稼働への不安が解消される
リアルタイム制御専用プロセッサ搭載により、IMCはWindowsの負荷や動作に一切影響を受けずに高速・高精度な制御を実行します。そのため、PCがフリーズしたりWindowsに障害が発生した場合であっても、安全に装置を停止することが可能です。

IMCができる9つのこと
IMCには、PCベース制御をより柔軟で強力にするための多彩な機能が搭載されています。
ここでは、IMCの特長を支える「9つのできること」をわかりやすくご紹介します。

PCを自由に選べる
PCI Expressスロットがあれば、どんなPCにもチューニングレスで接続・運用可能。

Visual Studio で統合開発
PCと制御のアプリをC++/C#で一つの環境で開発。RT制御アプリは専用のMOS言語で開発。
PCが落ちても止まらない
Windowsがクラッシュしても、IMCは動作を継続。安全停止処理も可能。

PCに依存しない独立制御
リアルタイムプロセッサ搭載で、PCから独立した高速・高精度で安定した制御を実行。
高速データ通信(PCIe)
PCアプリ間と制御アプリ間を、高速・シームレスに連携。スループット向上に貢献。
オープンネットワーク対応
EtherCATマスタ搭載で、IO・モーション・データを一括制御。省配線デバイスを自由に選択。
スタンドアロン動作も可能
Ethernet経由のLAN接続でもPCと接続可能。システム構成は自由自在。

画像連携モーション制御
カメラ検査に最適なエンコーダ出力同期カメラトリガ出力機能を標準装備。

専用ファーム開発可能
専用制御機能の追加など、お客様のニーズに合わせたカスタマイズを柔軟にサポート。
IMCを導入すると得られる3つの効果
「ハードウェア制約から解放されたい」「リアルタイム制御と安定稼働を両立したい」
そんな現場のニーズに、IMCが最適な解決策を提供します。
ここではIMCの強みを活かした、代表的な2つの導入構成例をご紹介します
【構成例①】外観検査装置に最適|カメラと同期する高速・多軸制御構成
1台のPCに機能を集約。画像撮像から制御、処理、通信をこれ一つで。
▶ 構成図

▶ 機能ポイント
- 16軸以上のモーション制御とカメラ同期撮像を両立
- 高速(250μs)制御+中速(1ms)制御を分離し同時制御可能
- IMCとWindowsアプリが共有メモリでシームレス連携
産業用PCに複数枚のIMCを搭載し、多軸制御装置や外観検査装置をそれぞれ分担。Windowsアプリがビジョン処理・UI表示・記録解析などを担当し、IMCがリアルタイム制御を実行。
他の拡張ボード(グラバー、A/D、D/A)と共に1台のPCに集約し、高密度・省スペース・省配線を実現。
【構成例②】離れた場所でも簡単導入|LAN接続による分散リアルタイム制御
離れた場所でも省配線でリアルタイム制御。旧設備の置き換えに最適な分散制御構成
▶ 構成図
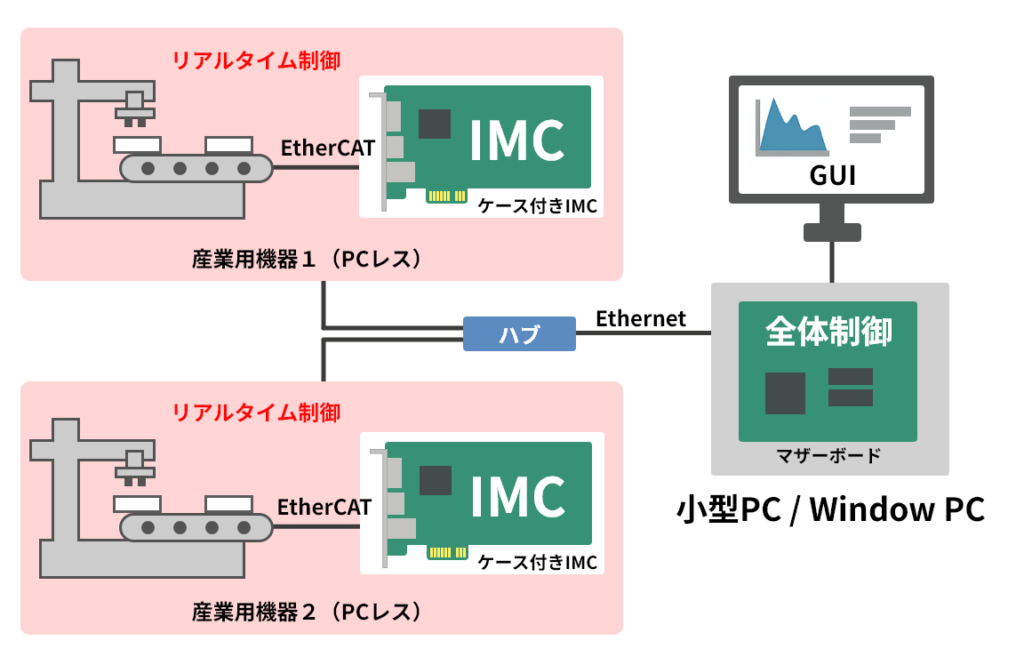
▶ 機能ポイント
- 16軸以上のモーション制御とカメラ同期撮像を両立
- 高速(250μs)制御+中速(1ms)制御を分離し同時制御可能
- IMCとWindowsアプリが共有メモリでシームレス連携
産業用PCに複数枚のIMCを搭載し、多軸制御装置や外観検査装置をそれぞれ分担。Windowsアプリがビジョン処理・UI表示・記録解析などを担当し、IMCがリアルタイム制御を実行。
他の拡張ボード(フレームグラバー、GigEカメラ入力)と共に1台のPCに集約し、高密度・省スペース・省配線を実現。
導入をご検討中の方に
IMCの主な仕様
導入前にチェックしておきたい、IMCの仕様をまとめました。
ご不明点があればお気軽にお問い合わせください。
一般仕様
| 外形 | PCI Express カード フルハイト/ハーフレングス(ヒートシンク高さより2スロット占有) |
|---|---|
| サイズ | 168.65× 111.15(コネクタ,取付金具部含まず) |
| 使用温度範囲 | 0℃~50℃ |
| 使用湿度範囲 | 90%Rh 以下(結露無きこと) |
| 消費電力 | 最大7W |
| 電源供給 | +3.3V±9% / 3A |
| 質量 | 約0.2kg |
| 対応OS | Windows10(x64)またはWindows11 AmxCtrlNet クラスライブラリ(.NET ライブラリ)提供 |
接続・インターフェース
| バス | PCI Express Gen1 x1 |
|---|---|
| LAN | Ethernet 1000BASE-T(1Gbps)× 1ch |
| フィールドバス | EtherCAT(100Mbps) |
| その他 | 5V系IO 6IN/8OUT(最大) |
| 24V系IO 8IN/8OUT(最大) | |
| RS-485 × 1ch | |
| RS232C × 1ch | |
| エンコーダ入力 最大10MHz(A相B相4逓倍時)× 2ch(最大) | |
| カメラトリガ出力 差動 × 2ch(最大) |
制御性能
| 最大制御軸数 および制御周期 | 4軸(制御周期250μs) 16軸(制御周期500μs) 32軸(制御周期1ms) |
|---|---|
| 同期制御軸数 | 8軸(最大) |
| 原点復帰機能 | OT+ORGの3センサ・OTの2センサ(各Z相あり・なし) |
| 加減速機能 | 直線 / 変形台形 / サイクロイド(各加減速 対象・非対称 対応) |
| 補間機能 | 直線(2次元・3次元)/ 円弧・円(各2次元・3次元)/らせん |
| 同期機能 | 同時スタート・ストップ / ガントリー / 電子カム |
| オーバーライド | 目標速度 / 目標位置 |
| リミット機能 | ソフトリミット / ハードリミット |
注1:厳密には、直線加減速曲線は、変形台形加減速曲線に含まれます。
注2:オーバライドの目標位置は、移動中に待ち時間ゼロで、無制限に目標位置を変更できるものではありません。カメラにてプレイスする物体の位置ずれを認識して、目標位置をわずかに変更するための機能です。
EtherCAT仕様
| 通信方式 | Ethernet 100BASE-TX |
|---|---|
| 通信速度 | 100Mbps(全二重) |
| ネットワークトポロジ | バス接続(ライントポロジ) |
| 通信周期 | 250μs、500μs、1ms(選択可能) |
| 制御方法 | CiA402ドライブプロファイルCSPモード |
| データ交換方式 | PDO(周期通信)およびSDO(非周期通信) |
| ケーブル長 | ノード間最大100m(Cat5e以上のツイストペアケーブル推奨) |
※ EtherCAT®は、ドイツBeckhoff Automation GmbHにより ライセンスされた特許取得済み技術であり登録商標です。
IMC関連ソフトウェア・ツール
IMCの導入・開発をサポートするツールをご用意しています。
ソフトウェア
モーションコントローラ
リアルタイムマシン制御
統合開発環境

プログラム開発支援ツール
MOTIWARE Tools

制御用ライブラリ
その他API
ダウンロード
製品カタログや取扱説明書、お役立ち資料など
こちらからダウンロードできます。
お問い合わせ
「商品について」「機能の実現性」「価格・お見積もり」など、お気軽にお問い合わせください。
経験豊富な技術スタッフが、迅速にサポートします。
電話でのお問い合わせ

(受付時間:平日 9:00〜17:00)
