

スタンドアローンモーションコントローラ「InterMotion」の使用例をご紹介します。
スリップ、静電気が最小限の大型FPD搬送装置
大型FPDを複数のモータで1ms同期搬送する装置です。
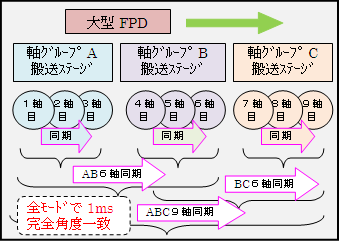
3軸毎、軸グループに分けられています。
グループ単体動作、隣との2グループ同期動作、全グループ同期動作の3モード
どのモードにおいても、1ms制御の位置制御で完全角度一致しています。
搬送モード移動時も同期が保たれ、スリップ、静電気発生は最小限になります。
上位コントローラは、オムロンPLCです。
LAN経由FINSコマンドでつながります。
3軸、3軸、3軸の図を示していますが、
例えば、7軸、5軸、4軸、合計16軸の攻勢も可能です。
オムロンPLCに対して、ハブをつけて、4つのモーションコントローラ
合計64軸の運転も可能です。
ただし、モーションコントローラをまたがる時間はIOで同期をとりますので、数msの遅延が発生します。
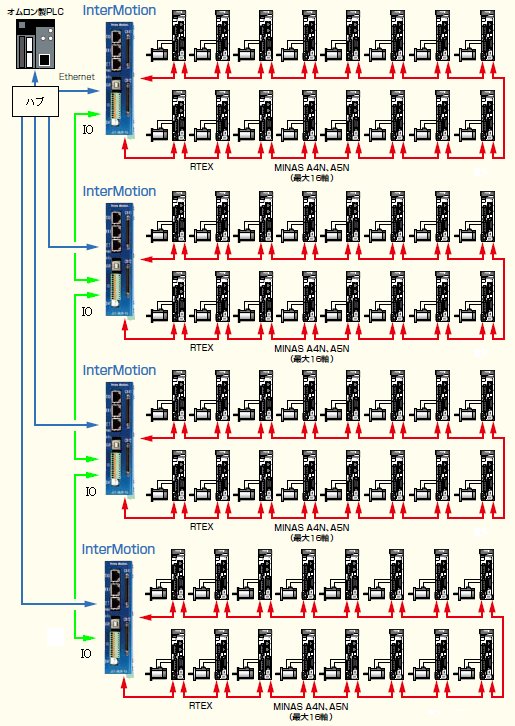
PLC内DM(データメモリ)を経由して、位置指令、速度指令を授受しています。
特殊な動作に対応するためにMOS言語(C言語ライクの独自言語)プログラムの作成が必要です。
高剛性の産業用特殊ロボットの高精度連続軌跡制御
高剛性多関節ロボットの高精度連続軌跡制御です。
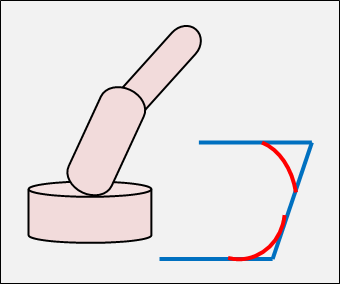
※ロボットの実際の構造はかなり異なります。
従来のロボットコントローラに比較して、高速時に高精度な軌跡が可能になります。
高剛性ロボットでその特徴をいかんなく発揮します。
直角の角を丸めないで、きちんと角を描きます。
アブソリュートシステムです。
複雑なロボット構造の順機構解、逆機構解については、
お客様から計算式を提示していただいて、実施致します。
ノートパソコンの座標データCSVファイルを使用するドリル装置
XYステージの上の板にドリルで穴をあける装置です。
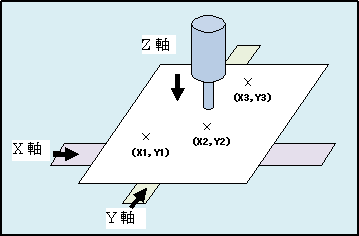
モーションコントローラの上位は、Windows ノートパソコンです。

パソコンの中のCSVファイルにたくさんの穴のX座標、Y座標が、まとめてあります。
このX座標、Y座標のデータを使って、XYステージの位置決めを次々行います。
パソコンから、モーションコントローラへ座標、Y座標をまとめて送信しておいて、
モーションコントローラ内で移動命令を発行すると、データ待ち時間が減って、タクトが向上します。
座標データが多い場合、
モーションコントローラ内で移動命令を発行している最中に、
次のX座標、Y座標データをまとめて送信することができます。
グラインダー軸トルクを監視して押し当て速度を変更する低コストバリ取り器
グラインダー軸の負荷トルクが大きくなったら、砥石へのワーク押し当て速度を下げるシステムです。
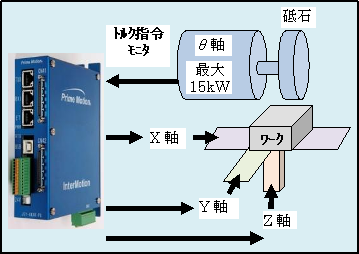
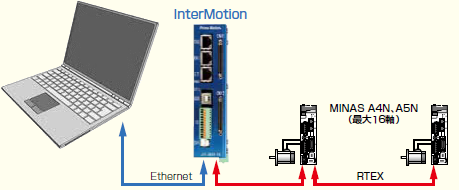
モーションコントローラ「InterMotion(インターモーション)」は、パナソニック社の100Mbps 高速通信 Realtime Express (RTEX) サーボドライバ「A5N」を制御します。
高速通信データの中に「トルク指令モニタ」があります。
この機能を使って、グラインダー軸のトルク指令をモニタしながら、他の軸、X軸、Y軸、Z軸の速度変更を行います。
モーションコントローラ「InterMotion」の中で以下の命令を使用します。
トルク指令取得関数は
RobGetCurrentTorque();
速度変更の関数は
RobSetSpeedOverride();グラインダのモータ容量は、15kWまで可能です。
パナソニック社高速通信「RTEX」サーボドライバ「A5N」は、
3相AC200Vの15kWまで、駆動できます。

