
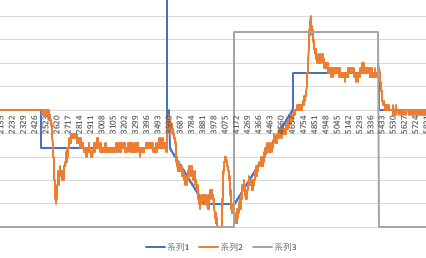
縦軸は、速度。横軸は時間。1msのサンプリング。
青い波形は、モーションコントローラ「InterMotion」の速度指令。
橙の波形は、位置フィードバックから計算した実際の速度。
(この波形は、ゲインが足りない)
灰色の波形は、DOG(HOME)センサ信号。LowがDOGの中。
■詳しい動きの説明。
DOG(HOME)中に居て、原点復帰開始の場合。
波形の左から、
原点復帰速度2でZ相サーチ。
Z検出で速度ゼロ(即停止)。
その後、原点復帰速度2になって、加速して、原点復帰速度1。
DOG(HOME)抜けたことを検出して、減速停止。
反転して、原点復帰速度2で、DOGから抜け出て、即停止。
DOGのエッジで原点復帰完了。
モーションコントローラ「InterMotion」付属の動作波形観測アプリ
「MotiwareAnalyzerAM」(モーティウェア・アナライザ・エーエム)で
csvファイルを保存して、エクセルで解析しています。








