
※この記事は2011年6月21日に書かれたものです。
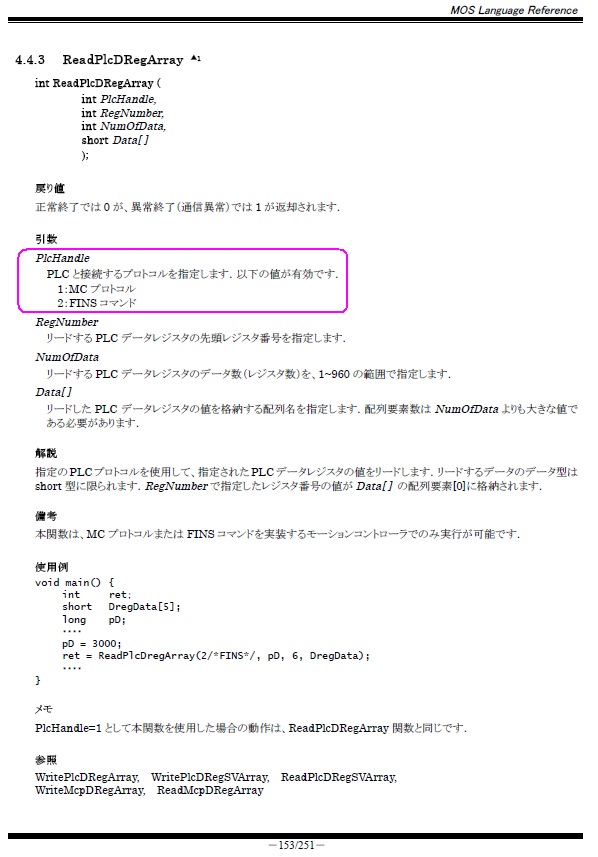
三菱PLCもしくはオムロンシーケンサのDレジスタをMCプロトコルもしくはFINSコマンドでリードするMOS関数。
ReadPlcDRegArray();
リードPLC Dレジスタアレイ
もう、そのままの名前。

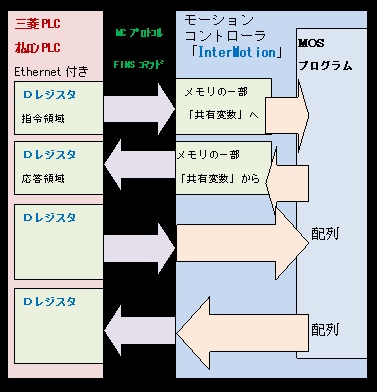
写真は、プライムモーション社のスタンドアローンマシンコントローラ「InterMotion」。
このコントローラが
・MCプロトコル
・FINSコマンド
両方に対応になりました。
「InterMotion」の制御プログラムは、MOS言語で開発することができます。
例えば、シーケンサのデータレジスタをリードして、変数に格納する関数は、
ReadPlcDRegArray();
です。
1つめの引数に
1を書けば、MCプロトコル、
2を書けば、FINSプロトコル、
を使用します。
詳細は、以下をクリックして、拡大してみてください。
このページは、MOS言語マニュアルから引用しました。
似た機能の関数で、
・変数の内容をDレジスタにライト
・Dレジスタをリードして、MOS資源の「共有変数」に格納
・MOS資源の「共有変数」の内容をDレジスタをライト
する関数もあります。
読者のみなさん、
このマルチPLC接続機能がおもしろそうだったら、
『「InterMotion(インターモーション)」って、各社のPLCにつながるみたいだよ!』って、広めてください。
いろいろ便利な関数が追加になって、MOSランゲージリファレンスが251ページになってしまいました。
がんばって、マニュアル書いています。
実際に書いているのは、「モーションおやじ」ではありません。
スキーとMOS言語?をこよなく愛しているMさんが書いています。
(クリックで拡大します)
MOS言語では、以下の制御の記述が可能です。
・パナソニックのRealtime Express省配線サーボ
・パルス列位置指令のサーボ、ステップ
・RTEXサーボとパルス列サーボ混在のロボット
に対する多軸同期PTP移動、直線補間、円弧補間、らせん補間
・DI,DO制御
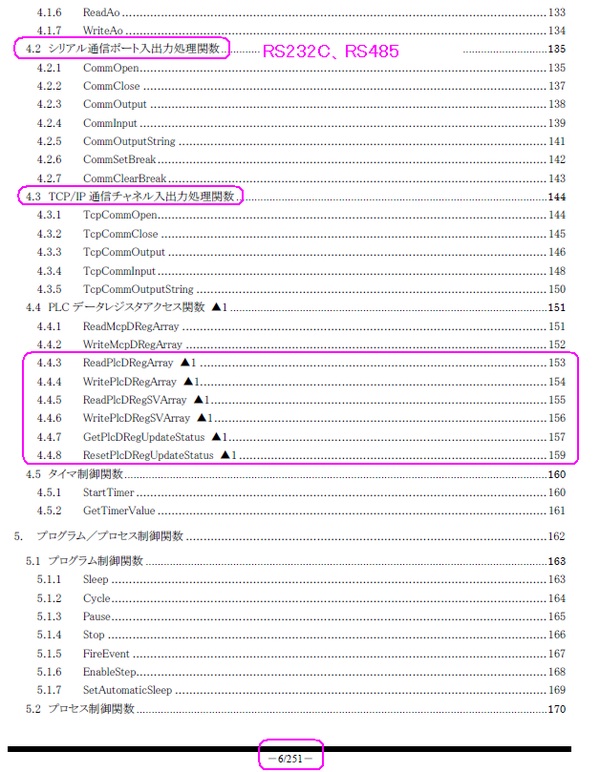
・RS232C、RS485通信制御
・TCP/IP通信制御
・タイマー制御
等々








