
※この記事は2009年8月23日に書かれたものです。
今日は、モーション制御。
PTP移動命令を発行しておいて、現在位置を監視しながら、ある現在位置になったら、低速の速度に変更する話。
速度波形としては、下図になる。
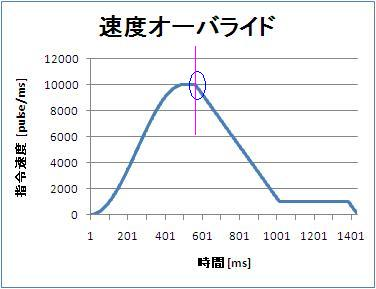
図の紫色の線のタイミングで、次の速度1000[pulse/ms]になるように、速度変更命令(速度オーバライド)を発行している。
移動していて変化している現在位置を監視しながら、所定の現在位置になったら、速度変更命令を発行する。
この現在位置監視、速度変更命令をソフトウェア処理で行ったら、上図の紫色の線は、どれくらいジッタになるだろうか?
今日は、課題提示で、実験結果は改めて。








