
※この記事は2009年8月15日に書かれたものです。
昨日の続きで、
移動命令の途中でOUTポートON、別の移動命令の途中でOUTポートOFFしたい。
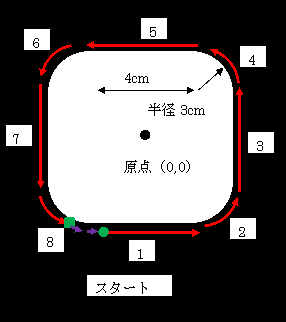
緑の●でポートONして、緑の■でポートOFFする。
昨日記事のプログラムによる動作波形。縦軸速度。横軸時間[s]。
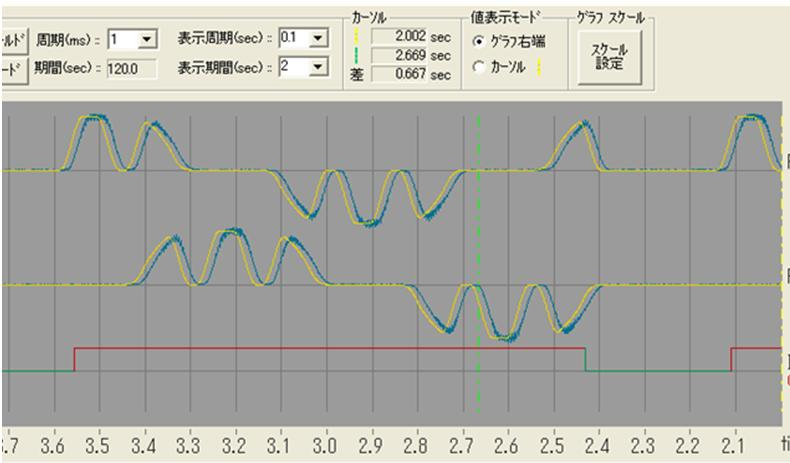
一番上は、X軸の指令とフィードバック。
まん中は、Y軸の指令とフィードバック。
一番下は、出力ポート。
最初の移動途中10%で、ポートON。最後の移動途中90%でポートOFFしている。
モータはメカトロリンクIII。
位置とポートON/OFF制御の時間分解能は1ms。
例によって、Windowsで手軽にリアルタイムIO制御環境「MOS Bench(モスベンチ)」付属の1msサンプリング120秒ロギングツール「Motiware Analyzer(モウティウェア アナライザ)」を使って、動作波形取得しています。
上記の動作波形取得は、新卒社員が行いました。
■お客様のご希望があれば、
(1)補間命令間の加減速時間はゼロにして、
移動途中で、ポートON。別の移動途中でポートOFFも可能。
(2)円弧部分のシーリングが太らないように
円弧補間時は、直線補間時速度から
減速して、定速になって、加速して
直線補間速度に戻ることも可能。







