今回のミッション
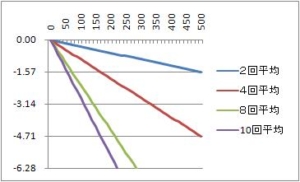
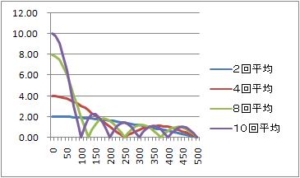
モータの軸が振動しているとき、すなわち、ロータリーエンコーダを入力がアップダウンするときの移動平均フィルタによる速度検出フィルタの動きをみてみたい。
周期20msで、±1の振動をしている場合
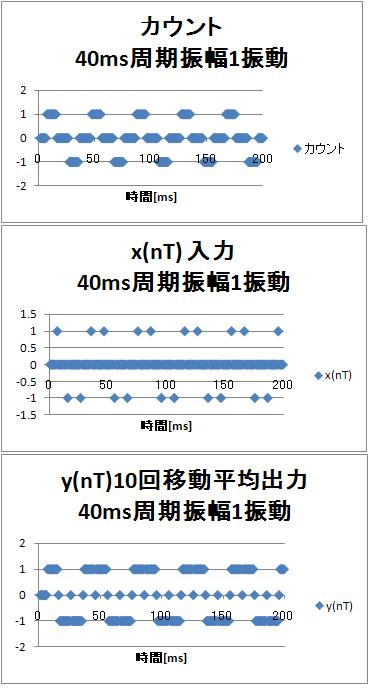
周期20msで、±1の振動をしている場合
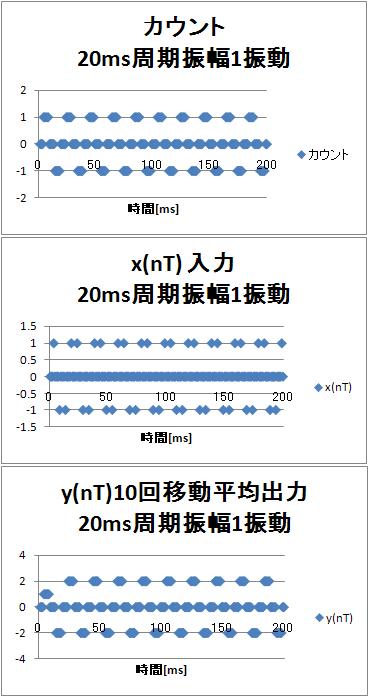
いずれの周期の振動も、振幅が小さく、入力データ$x(nT)$の値が小さい領域での移動平均フィルタ動作なので、$x(nT)$と移動平均フィルタ出力$y(nT)$の明確な差異がわからない。
エクセルのデータはこちら
移動平均フィルタによる振動時の速度検出フィルタ効果(周波数検出フィルタ)Execlデータ
シミュレーションのブロック図は、こちら
あわせて読みたい
【FIRフィルタ】第13回:移動平均フィルタによる速度検出フィルタ(周波数検出フィルタ)
今回は、移動平均フィルタへの入力を変えてみる。いままでの記事では、正弦波入力波形を示してきた。今回は、周波数検出、速度検出を意識して、パルスを入力してみる。 ...