とあるテーマで、モータの直径を小さくしたいということで、ロータリエンコーダの分解王が1回転あたり26カウント(64パルス)しかないモータ制御の仕事をした。-10000rpmから10000rpmの両方向可変速度制御だ。
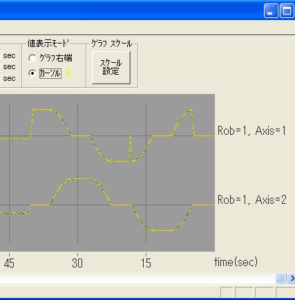
速度フィードバック、位置フィードバックの分解能がなくて、定速時まともに制御できない・
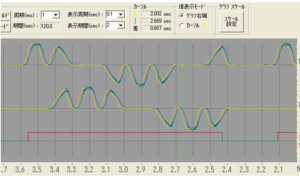
いろいろな工夫で、定速時にも位置指令に追随してそこそこ滑らかに動くようにした。
プログラム行の順番を変えるだけで、性能が向上することがある。
そのためだけに、半日費やすこともある。
サーボ制御プログラムは、ハードウェアが密接に関連して、しかもフィードバックループを構成して因果関係が複雑なので、行数だけで作業日数を判断できない。