モータケーブルに流れる実際の相電流から、
・実効電流(q軸電流。実際にトルク発生として使われる電流。回転する磁石に対してタイミングよく反発する電磁力を発生する電流)
・無効電流(d軸電流。回転する磁石に対して、引き合って停止する電磁力を発生する無駄な電流)
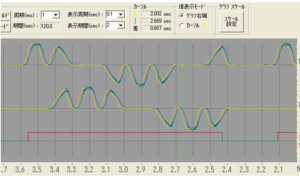
を求める計算をdq座標変換という。図は、そのエクセルによるシミュレーション。このグラフでは、流れているU相電流とV相電流は、q軸電流(有効電流)成分のみで、無駄がない状態になっている。
計算式は
iqa = cos(θ+π/3) * iua + cosθ * iva
ida = sin(θ+π/3) * iua + sinθ * iva
iqa : q軸電流
ida : d軸電流
iua : U相電流
iva : V相電流
θ : 電気角 [rad]
エクセルの元データが欲しい方は、こちら 「motion_oyaji_dq081011.xls」をダウンロード 振幅は、1に規格化されています。
元ネタは、杉本英彦編著「ACサーボシステムの理論と設計の実際」、総合電子出版社、1990、79ページの(4.11)式
http://robotcontroller.cocolog-nifty.com/blog/2008/01/post_d274.html
あるいは、電気学会の「基礎電気機器学」にも詳しく記述されている。
http://robotcontroller.cocolog-nifty.com/blog/2008/01/post_5d8f.html
ちなみに、この計算は、ブラシレスモータで意味がある。ブラシ付きモータは、基本的にはq軸電流のみになるよう機械的に設計されている。