昔から、お付き合いのあるお客さんで、「手伝ってほしい」と言うテーマがあって、RS422通信指令のポールセンサ付きモータの制御をやっている。(というか、実務はメンバーに任せて、最後の調整に付き合っている)
ロータリーエンコーダは、付いていない。したがって、120度通電。ワンチップのモータ駆動ICでも可能な駆動方法。
しかし、通信指令で
・トルク制御や回転数制御のモード切替
・トルク指令値、回転数指令値の設定
・各種ゲインを設定、参照
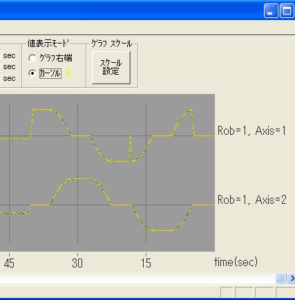
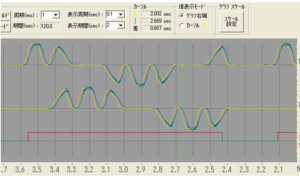
・現在速度、現在トルクのモニタ
等、行いたいとのこと。
それで、いつも使用している12bitADコンバータ付き100MHz動作のDSPで制御している。
100MHzは当然オーバースペック。原価は少し高くなるが、台数は出ないので、原価に余裕がある。「開発費を抑えてくれ」とのことで、慣れた環境、CPU演算パワー不足の心配のない100MHzの出番となった。
いつものDSPはこれ:
http://robotcontroller.cocolog-nifty.com/blog/2008/01/dsp_5f23.html
参考記事:
モータ制御の仕事をスマートにこなしたい
http://robotcontroller.cocolog-nifty.com/blog/2008/09/post-f9f6.html