
※この記事は2009年8月24日に書かれたものです。
昨日の続き。
Windowsをリアルタイムした環境で、モータにPTP移動指令を出した後、ソフトウェアで現在位置を監視して、所定の現在位置になったら、速度オーバライドを実行すると、以下の指令速度波形になる。
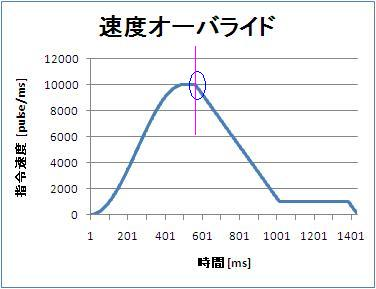
下のグラフは、4回重ね書きして、上のグラフの○印の部分を拡大している。
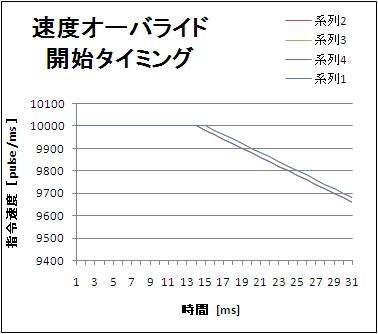
13回評価したが、ジッタは、レンジで1ms。
ユーザのリアルタイムアプリは、リアルタイムインタープリタ上で、2本実行している。
当然、リアルタイム側の処理負荷によって変わりますが、参考データとしてみてください。
このデータは、
プライムモーション社のWindowsで手軽にリアルタイムIO制御環境「MOS Bench(モスベンチ)」の同梱ユーティリティ「MOTIWARE Analyzer(モウティウェア アナライザ)」を使用しました。
このツールは、ソフトウェアリアルタイム1msサンプリングで、モーションコントローラの位置指令を簡単にロギングできます。(分解能が1msなので、上のグラフで、1msのジッタになっています。)
新卒社員が、データを取得して、上のグラフを作ってくれました。どんどんお願いしています。








