
この記事は2009年8月12日に書かれたものです。
MechatrolinkⅢ(メカトロリンクスリー)と∑-V(シグマ5)の応答性比較をしてみました。
モーションコントローラは、Windowsで手軽にリアルタイムIO制御環境「MOS Bench(モスベンチ)」を使っています。
MechatrolinkⅢと∑-Vパルス列に同期した、同じ移動速度、加速時間、減速時間、位置目標値の移動指令を与えます。
なお、∑-Vパルス列サーボパックでは、位置フィードバック用のA,B相出力信号の周波数上限があるので、サーボパック内のパラメータ設定で、1/16のA,B相出力にしています。また、指令側サーボパック内の電子ギヤで16倍に増速しています。
MechatrolinkⅢと∑-Vパルス列に対して、モーションコントローラ側の位置指令コマンドは同期しているので同じタイミングで同じ指令が出力されます。
MechatrolinkⅢと∑-Vパルスともに、1ms毎位置指令を作成しています。MechatrolinkⅢの通信周期は1ms。
しかし、フィードバック波形は、MechatrolinkⅢと∑-Vパルス列で異なります。
以下のグラフを見てください。縦軸は速度、横軸は時間[ms]です。
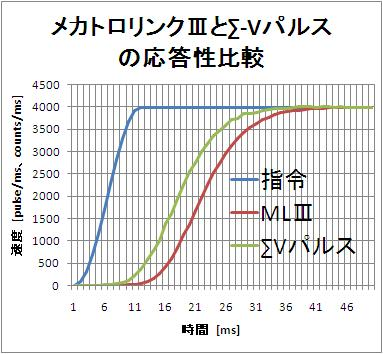
同じ指令に対して、メカトロリンクⅢ(上図では「MLⅢ」)が、∑Vパルスに対して5ms遅れます。
ただし、上のMLⅢ波形は通信によるフィードバックデータなので、実際のモータの動きより、さらに遅れています。モーションコントローラが認識する現在位置という観点で、上の波形を比較してください。
なお、サーボパックの中のゲイン関係パラメータPn1**は、アドバンスドオートチューニングをしたメカトロリンクⅢサーボパックの値を∑-Vパルスにコピーして、同じにしています。
このデータは、Windowsで手軽にリアルタイムIO制御環境「MOS Bench(モスベンチ)」で取得しました。
最大8軸の指令コマンド、フィードバックカウンタ(合計16ch)を同時に1msサンプリングで120秒間ロギングできます。
取得データのパラメータを変えると、
最大8軸の指令パルスカウンタ、フィードバックカウンタ(合計16ch)を同時に1msサンプリングで120秒間ロギングできます。
評価が楽です。
このデータは、新入社員がサーボパックのマニュアルと悪戦苦闘しながら、取りました。
知識ゼロから、このデータを取るまでには、結構時間がかかります。
サーボって、本当に難しいですね!







