このページでは、
プライムモーションの4つの製品についてご紹介します。


InterMotion(インターモーション)
上位コンピュータとLANで自由に繋がる
スタンドアローンタイプのモーションコントローラ
異なる要望に応える3つのシリーズ
JOY-AMXGxx シリーズ
パナソニック社RTEXサーボ位置決め専用。PLCにEthernet接続。PLC接続用プログラム内蔵。お客様は、慣れたPLCのラダープログラムを書くだけで、パナソニック社のサーボドライバA6Nなどを経由して、サーボモータを動かせます。

【標準品】JOY-AMXG16, 32, 64 いずれも※KCマークあり
| 項目 | 仕様 |
| 制御軸数 | 16軸 1ms位置指令生成周期 32軸 1ms位置指令生成周期(16ロボットまで) 2ms位置指令生成周期(17ロボットから32ロボット) 64軸 1ms位置指令生成周期(16ロボットまで) 2ms位置指令生成周期(17ロボットから32ロボット) 4md位置指令生成周期(33ロボットから64ロボット) |
| 制御方式 | 独立PTP移動、多軸同期PTP移動(最大8軸同期) |
| 対応上位コントローラ | 三菱電機PLC、キーエンスPLC、オムロンPLC、パナソニックPLC |
| 上位との通信 | Ethernet、100BaseTXによるMCプロトコル、FINSコマンド |
| お客様プログラム | お客様準備PLC内ラダー。JOY-AMXG16内のプログラム開発は不要です。 |

※KCマーク:韓国内で販売される製品の安全性を保証する国家認証マークです。

64個のモータがたった1つのモーションコントローラで制御され、動いている様子は壮観です!

JOY-AMXGxx WBシリーズ
パナソニック社RTEXサーボ位置決め専用。WindowsパソコンにEthernet接続。
お客様は、VisualStudioから慣れたC#などでプログラムを書くだけで、パナソニック社のサーボドライバA6Nなどを経由して、サーボモータを動かせます。
【標準品】JOY-AMXG16, 32 WB
| 項目 | 仕様 |
| 制御軸数 | 16軸 1ms位置指令生成周期 32軸 1ms位置指令生成周期(16ロボットまで) 2ms位置指令生成周期(17ロボットから32ロボット) |
| 制御方式 | 独立PTP移動、多軸同期PTP移動(最大8軸同期) |
| 対応上位コントローラ | Windows10 パソコン 64bit |
| 上位との通信 | Ethernet、1000BaseT(Giga-Ether)による高速通信。TCP。.NetFramework用ライブラリー提供 |
| お客様プログラム | Windows アプリケーション。JOY-AMXG16内のプログラム開発は不要です。 |
JOY-AM8 WB
パルス列位置指令8軸出力。パルス列位置指令入力のサーボドライバ、ステッピングモータドライバに接続できます。WindowsパソコンにEthernet接続。
お客様は、VisualStudioから慣れたC#などでプログラムを書くだけで、モータを簡単に動かせます。

【標準品】JOY-AM8-WB
| 項目 | 仕様 |
| 制御軸数 | 8軸 1ms位置指令生成周期 |
| 制御方式 | 独立PTP移動 |
| 対応上位コントローラ | Windows10 パソコン 64bit |
| 上位との通信 | Ethernet、100BaseTX。TCP。.NetFramework用ライブラリー提供 |
| お客様プログラム | Windows アプリケーション。JOY-AM8-WB内のプログラム開発は不要です。 |
更に詳しい仕様、価格はこちら
モーションカード
Windowsでリアルタイム制御可能なモーションカードです。
リアルタイムの拡張ソフト、ドライバ、モータ制御、
IO制御ランタイムソフトが付属しています。


PCI カード一覧
| 機能 | 形式 | 備考 |
|---|---|---|
| Motion | JOY-RT40PR | 40軸位置指令マスタ RTEX32軸と10MPPSパルス列8軸 8軸ABカウンタ |
| Motion | JOY-RT40PR-PNP | 40軸位置指令マスタ RTEX32軸と10MPPSパルス列8軸 8軸ABカウンタ PNP対応IO |
| Motion | JOY-RT8DR | 8軸位置指令マスタ 8軸10MPPSのパルス列出力 8軸ABカウンタ |
| Motion | JOY-RT8DS | 8軸位置指令追加用スレーブ 8軸10MPPSのパルス列出力 8軸ABカウンタ |
| Motion | JOY-RT8DR-PNP | 8軸位置指令マスタ 8軸10MPPSのパルス列出力 8軸ABカウンタ PNP対応IO |
| Motion | JOY-RT8DS-PNP | 8軸位置指令追加用スレーブ 8軸10MPPSのパルス列出力 8軸ABカウンタ PNP対応IO |
PCI Express カード一覧
| 機能 | 形式 | 備考 |
|---|---|---|
| Motion | JOY-RT40PRE | 40軸位置指令マスタ RTEX32軸と10MPPSパルス列8軸 8軸ABカウンタ |
| DIO | JOY-IO6464E | 64IN, 64OUT |
MOS Bench PC(モスベンチPC)
リアルタイム制御用パソコン
Windows10 Enterprise 2016 LTSB(x64)環境にて、リアルタイム性確認済み
一品一様装置メーカ向け、高速機械装置用コントローラ
PM00217Hシリーズ

【標準仕様概要】
| 項目 | 仕様 |
|---|---|
| 型式 | PM217H_2THDD2_06EJL |
| 外形 | 19inch 4U |
| PCIスロット、PCI-Express | 合計11スロット |
| CPU | Core i7 3.4GHz 第6世代 |
| メインメモリ | 16GB |
| ストレージ | HDD2TB |
| 光学ドライブ | DVD Super Multi Drive |
| LAN | 2port(Windows制御) ※1Portはリアルタイム制御可能 |
| USB | 4port(Windows制御) |
| COM | 2port(Windows制御) |
| 電源 | ニプロン500W |
PM00224Hシリーズ(ミニタワーサイズ)

【標準仕様概要】
| 項目 | 仕様 |
|---|---|
| 型式 | PM00244H_HDD_06EJL |
| 外形 | ミニタワー、フロアマウント金具付き |
| PCIスロット、PCI-Express | 合計6スロット |
| CPU | Core i7 3.4GHz 第6世代 |
| メインメモリ | 8GB |
| ストレージ | HDD500GB |
| 光学ドライブ | DVD Super Multi Drive |
| LAN | 2port(Windows制御) |
| USB | 4port(Windows制御) |
| COM | 2port(Windows制御) |
| 電源 | 500w |
ご興味のある方はこちらから。
気軽にご相談ください。
プログラム開発環境
3.4GHz の CPU で高速IO制御、モーション制御。
100本のプログラムを同時に実行
産業用製造装置メーカ、電子部品メーカ社内製造装置向けの
プログラム開発環境です。
システムを構成する4つのモジュール



MOS Bench(モスベンチ)
MOS言語(C言語ライクの機械制御言語)によるプログラムを効率よく開発するための環境です。
MOS言語を中間コードに変換した後、リアルタイムに実行可能です。
主要機能
| 機能 | ||
|---|---|---|
| 1 | ソースエディタ | MOSプログラム編集、実行トレース |
| 2 | プロセス制御 | 各プロセスの起動/停止、変数のリード/ライト、ビルド、ブレークポイント、変数モニタ |
| 3 | 共有変数 | 共有変数のリード/ライト |
| 4 | 入出力モニタ | 物理I/O、論理I/Oのリード/ライト、AD/DAのリード/ライト |
| 5 | 標準出力 | MOSプログラム言語のprintf()等で出力したメッセージを表示 |
NwController(リアルタイム実行可能なマルチプロセスコントローラ)
MOS言語を記述して、中間コードに変化したオブジェクトをWindowsリアルタイム環境でマルチプロセスで実行できるコントローラです。プロセス番号に実行したいオブジェクトを登録するだけで、複数プログラムの同時実行ができます。
マルチタスクを簡単に実現します。
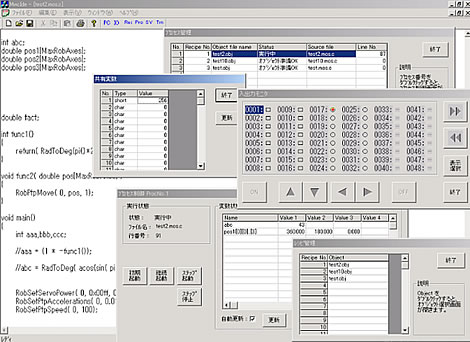
以下のプロセス管理画面から、リアルタイムインタープリタ実行を指定できます。
この画面では、4本のマルチプロセスになっています。
特徴
- 高速実行(3.4GHz の CPU で実行可能)
- 100本までのプログラムを同時実行可能
- 100本のプロセスと Windows アプリケーション間で65536の共有変数
MOTIWARE(モウティウェア)
「MOTIWARE(モウティウェア)」は、ソフトウェアモーションコントローラです。当社RTシリーズのカードとともに、通常パルス列発生ボードでは、実現できない複雑な機構を持ったメカニズムの軌跡制御が可能になっています。
モーションおやじ『MOTIWARE』 の主な特徴はこちら!
・複雑なメカニズムの軌跡制御
・複数のメカニズムを同時に40個まで独立して制御
・最大8軸の同期
・最大40軸、1ms毎の軌跡制御
・DIOカード、ADカード、DAカード、COMカードをリアルタイム制御
MOTIWAREが提供する主な関数はこちら。
| 種類 | 機能 |
|---|---|
| 機能 | |
| 円弧補間動作 | |
| 真円補間動作 | |
| XYZ座標系の最終目標位置の取得 | |
| XYZ座標系 の現在位置の取得 | |
| 原点センサ状態の取得 | |
| サーボ電源状態の取得 | |
| オーバーランセンサ状態の取得 | |
| XYZ座標系 で任意方向へJOG動作 | |
| XYZ座標系 でPTP動作 | |
| 原点復帰動作 | |
| 補間動作の加減速パラメータ設定 | |
| 補間動作の速度設定 | |
| PTP動作の加減速パラメータ設定 | |
| PTP動作の速度設定 | |
| サーボ電源のON/OFF |
設定ファイルの主要項目はこちら。
| 項目 | 内容 |
|---|---|
| システム全体 | 実機動作モード/シミュレータモード |
| 各メカニズム | 構成軸数 メカニズムの機構 アームの長さ |
| 各軸 | エンコーダの有無、エンコーダパルス数 軸の1移動単位あたりのパルス数 最高パルス列出力周波数 原点復帰方法(原点センサ使用、OTセンサ使用、など) 原点センサの有無、論理 オーバートラベルセンサ(OT)センサの有無、論理 |
「RTX」ランタイム
米国IntervalZero社(インターバルゼロ社)が販売開発しているWindowsをリアルタイム拡張するためのツールです。Windows-PCにRTXをインストールすることによって、PCをリアルタイムアプリケーションに使用できるようになります。
弊社製モーションカードでRTXランタイムライセンスを添付いたします。
プライムモーションが提案する、
業界新常識のWindowsリアルタイム制御について
さらに詳しく知りたい方はこちら
Contact
お問い合わせ
モータ制御でやりたいことが決まっている。
または、こんなことができるか相談したい。
実現する道筋が見えてくるかもしれません。
お気軽にお問い合わせください。