今回は、移動平均フィルタへの入力を変えてみる。いままでの記事では、正弦波入力波形を示してきた。今回は、周波数検出、速度検出を意識して、パルスを入力してみる。
一定周波数のパルスをカウントして、一定周期T毎、その差分を取る(引き算をする)。
$$x(n) = c(nT) – c((n-1)T)$$
これは、周波数検出になる。もし、そのパルス発生源がロータリエンコーダやリニアスケールならば、速度検出になる。このカウンタの差分データを10回移動平均に入力してみる。
サンプリング周期T=1ms、すなわち、サンプリング周波数1000Hzとして、いろいろな周波数を入力し、10回移動平均入力の$x(nT)$と、移動平均出力の$y(nT)$を以下に比較する。横軸は時間[ms]、縦軸は$x(nT)$もしくは$y(nT)$。
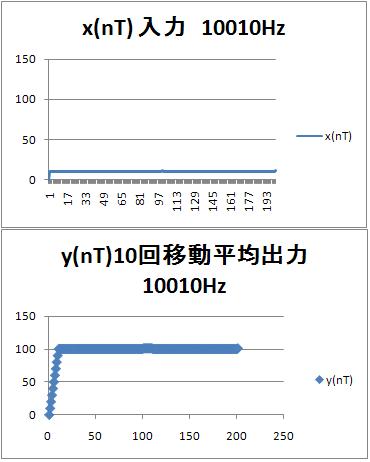
10010Hzのパルス入力に対する$x(nT)$と$y(nT)$
入力$x(nT)$、出力$y(nT)$ともの1のずれがある。入力$x(nT)$では平均10に対して1、出力$y(nT)$では平均100に対して1、なので、フィルタを通したことによりS/N比(信号とノイズの比)が10倍改善されている。
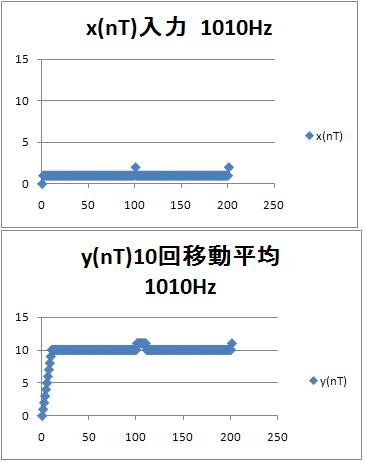
1010Hzのパルス入力に対する$x(nT)$と$y(nT)$
入力$x(nT)$、出力$y(nT)$ともの1パルスのずれがある。入力$x(nT)$では平均1に対して1、出力$y(nT)$では平均10に対して1、なので、フィルタを通したことによりS/N比(信号とノイズの比)が10倍改善されている。
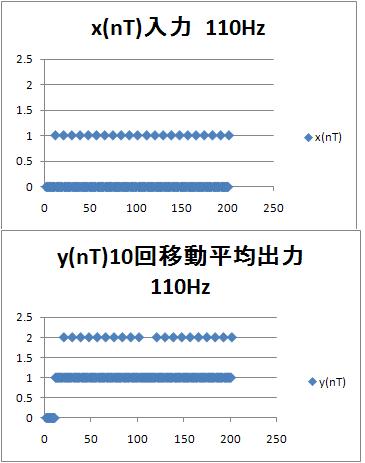
110Hzのパルス入力に対する$x(nT)$と$y(nT)$
入力$x(nT)$、出力$y(nT)$ともの1パルスのずれがある。入力$x(nT)$では0に対してたまに1、出力$y(nT)$では1に対してたまに1、なので、フィルタを通したことによりS/N比(信号とノイズの比)が改善されている。
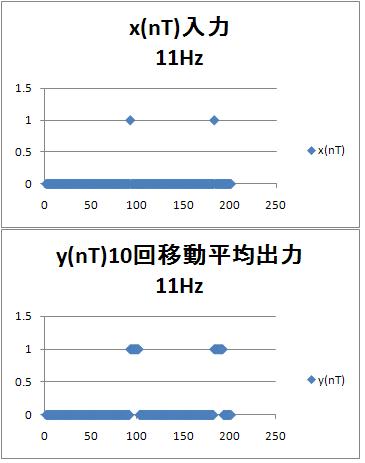
11Hzのパルス入力に対する$x(nT)$と$y(nT)$
入力$x(nT)$、出力$y(nT)$ともの1パルスのずれがある。入力$x(nT)$では0に対してたまに1、出力$y(nT)$では0に対してたまに1、なので、フィルタを通したことによりS/N比(信号とノイズの比)改善効果は、ない。
”10回” 移動平均にすると、サンプリング周波数 1000Hz に対して、その ”1/10” の 100Hz くらいまで、ノイズ改善の効果がある。
”1/100” の 10Hz 前後になると、効果がない。
エクセルの元データはこちら
移動平均フィルタによる速度検出フィルタ(周波数検出フィルタ)Excelデータ
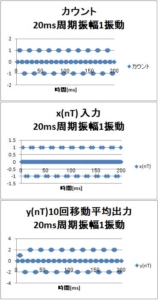
本記事では、定速時の動作について計算した。+1、-1、+1と振動している場合の動作については、次の記事で。